Self-Supervised
2026-04-15
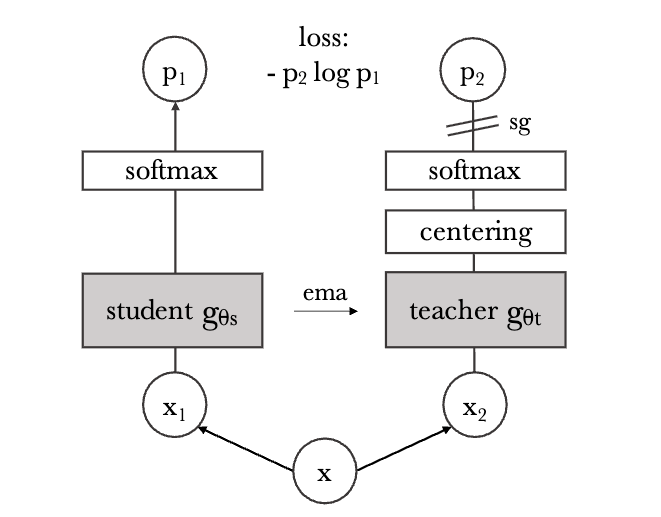
DINO Emerging Properties in Self-Supervised Vision Transformers 论文地址: arxiv.org/pdf/2104.14294 DINO摇摆到了动量式更新,果然【加动量】还是比【只用梯度停止】香。DINO的名字来自于Self- di stillation with no labels中的蒸馏和No标签。 DINO的训练步骤 其实以前的对比学习方案也可以理解为知识蒸馏,DINO里更具体得描述了知识蒸馏的含义。 下图展示了一个样本通过数据增强得到一对views \((x_1,x_2)\) 。注意DINO后面还会使用更复杂的裁剪和对比方案,但这里简单起见先不考虑那些。模型将输入图像的两种不同的随机变换 \(x_1\) 和 \(x_2\) 分别传递给学生和教师网络。 这两个网络具有相同的架构,但参数不同 。教师网络的输出以batch内计算的平均值,进行中心化(减去均值)。每个网络输出一个 \(K\)...