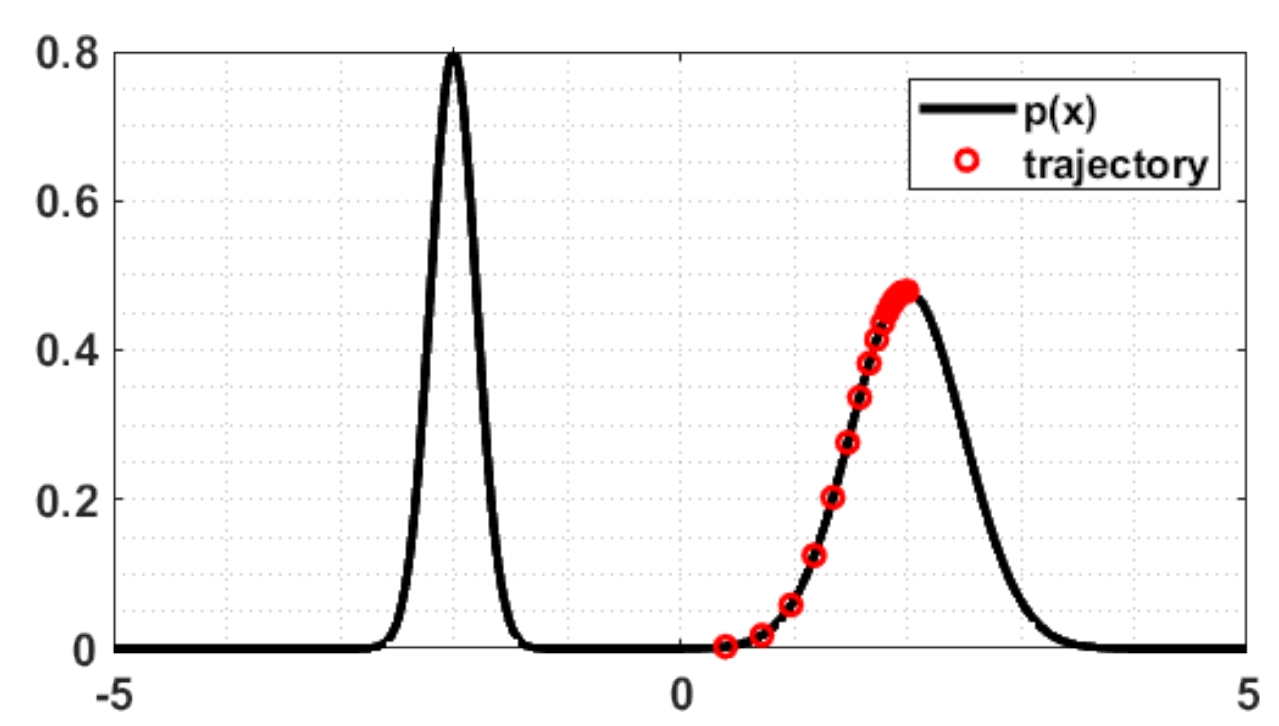
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...

11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
3D Model
2026-04-15

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...