3D Model
2026-04-15
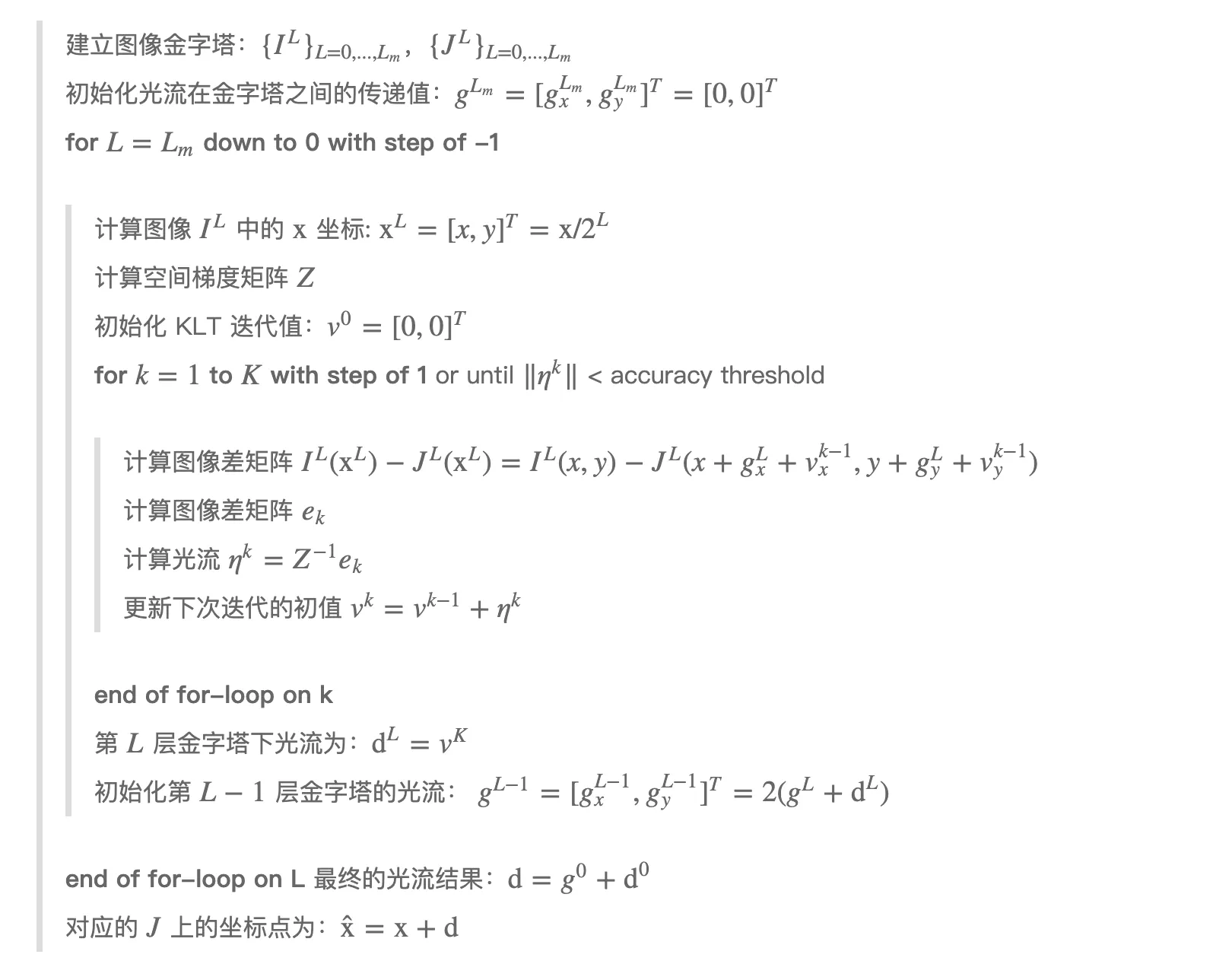
光流(Optical Flow)是物体在三维空间中的运动(运动场)在二维图像平面上的投影,由物体与相机的相对速度产生,反映了微小时间内物体对应的图像像素的运动方向和速度。 KLT 是基于光流原理的一种特征点跟踪算法,本文首先介绍光流原理,然后介绍 KLT 及相关 KLT 变种算法。 Optical Flow 光流法假设: 亮度恒定,图像中物体的像素亮度在连续帧之间不会发生变化; 短距离(短时)运动,相邻帧之间的时间足够短,物体运动较小; 空间一致性,相邻像素具有相似的运动; 记 \(I(x,y,t)\) 为 \(t\) 时刻像素点 \((x,y)\) 的像素值,那么根据前两个假设,可得到: \[I(x,y,t)=I(x+dx,y+dy,t+dt)\] 一阶泰勒展开: \[I(x+dx,y+dy,t+dt)=I(x,y,t)+\frac{\partial I}{\partial x}dx+\frac{\partial I}{\partial y}dy+\frac{\partial I}{\partial t}dt\] 由此可得: \[\frac{\partial I}{\partial...