Generative Model
2026-04-15

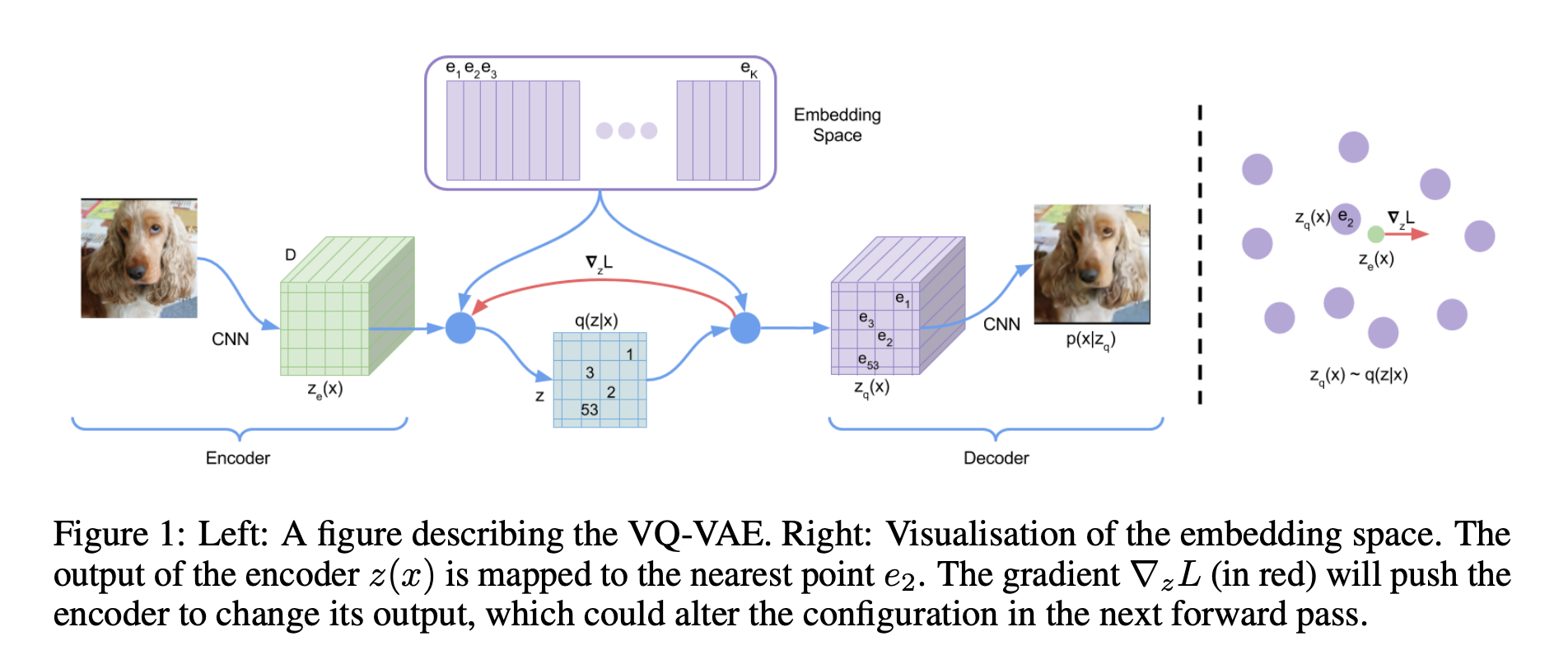
2022年中旬,以扩散模型为核心的图像生成模型将AI绘画带入了大众的视野。实际上,在更早的一年之前,就有了一个能根据文字生成高清图片的模型——VQGAN。VQGAN不仅本身具有强大的图像生成能力,更是传承了前作VQVAE把图像压缩成离散编码的思想,推广了「先压缩,再生成」的两阶段图像生成思路,启发了无数后续工作。 VQGAN 核心思想 VQGAN的论文名为 Taming Transformers for High-Resolution Image Synthesis,直译过来是「驯服Transformer模型以实现高清图像合成」。可以看出,该方法是在用Transformer生成图像。可是,为什么这个模型叫做VQGAN,是一个GAN呢?这是因为,VQGAN使用了两阶段的图像生成方法: 训练时,先训练一个图像压缩模型(包括编码器和解码器两个子模型),再训练一个生成压缩图像的模型。 生成时, 先用第二个模型生成出一个压缩图像,再用第一个模型复原成真实图像 。 其中,第一个图像压缩模型叫做VQGAN,第二个压缩图像生成模型是一个基于Transformer的模型。...