DFS
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
NLP
2026-01-11

摘掉Softmax 制约Attention性能的关键因素,其实是定义里边的Softmax!事实上,简单地推导一下就可以得到这个结论。 [Math] 这一步我们得到一个 [Math] 的矩阵,就是这一步决定了Attention的复杂度是 [Math] ;如果没有Softmax,那么就是三个矩阵连乘 [Math] ,而矩阵乘法是满足结合率的,所以我们可以先算 [Math] ,得到一个 [Math] 的矩阵,然后再用 [Math] 左乘它,由于 [Math] ,所以这样算大致的复杂度只是 [Math] (就是 [Math] 左乘那一步占主导)。 也就是说,去掉Softmax的Attention的复杂度可以降到最理想的线性级别 [Math] !这显然就是我们的终极追求:Linear Attentio...
NLP
2026-01-11

概述 本文介绍一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~ 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 1. 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 1. 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
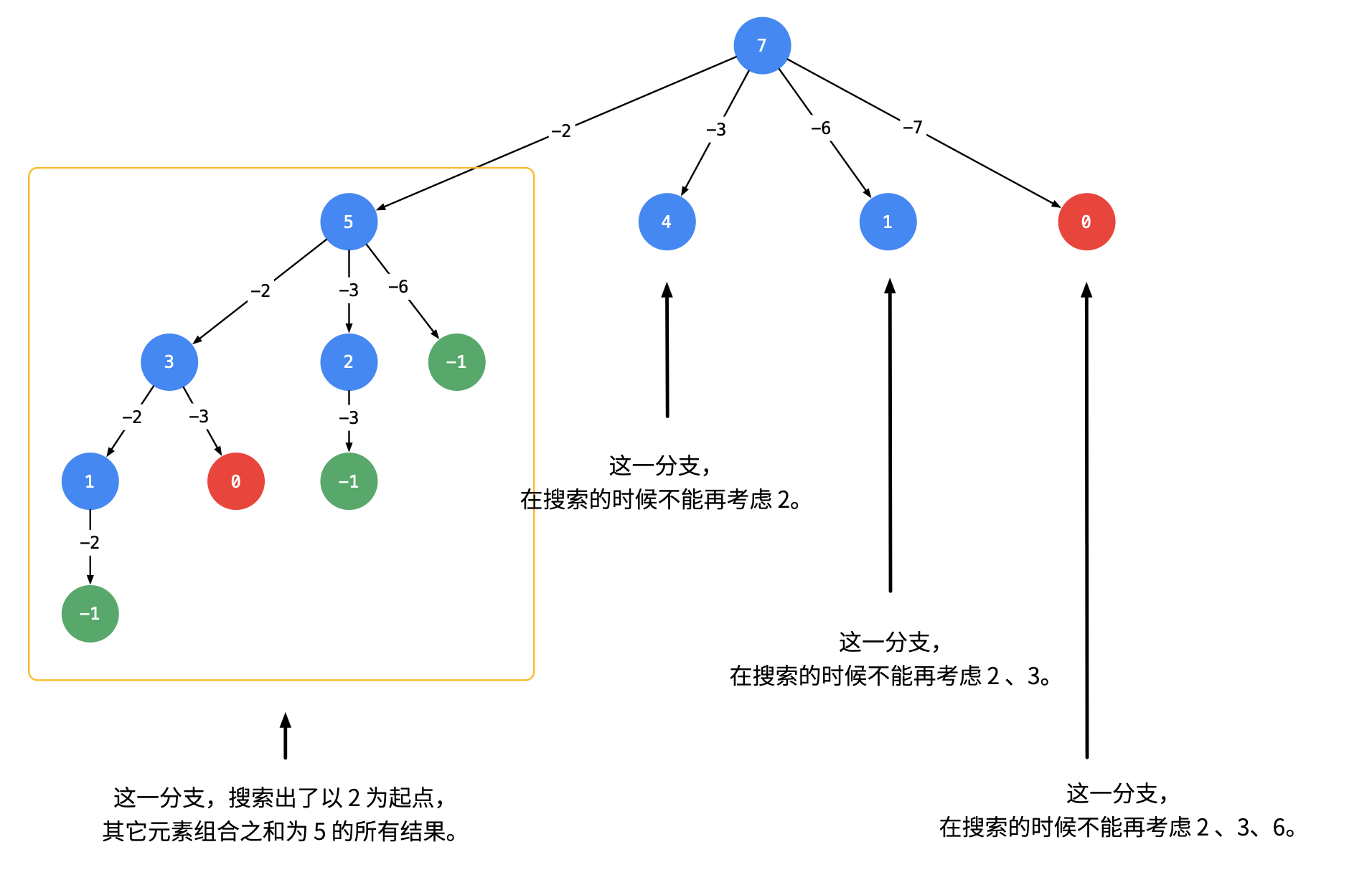
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
NLP
2026-01-11

概述 众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是 [Math] 级别的, n 是序列长度,所以当 n 比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到 [Math] 甚至 [Math] 。 改变这一复杂度的思路主要有两种: 一是走稀疏化的思路,比如OpenAI的Sparse Attention,通过“只保留小区域内的数值、强制让大部分注意力为零”的方式,来减少Attention的计算量。经过特殊设计之后,Attention矩阵的大部分元素都是0,因此理论上它也能节...
Preformer Performer的出发点还是标准的Attention,所以在它那里还是有 [Math] ,然后它希望将复杂度线性化,那就是需要找到新的 [Math] ,使得: [公式] 如果找到合理的从 [Math] 到 [Math] 的映射方案,便是该思路的最大难度了。 激活函数 线性Attention的常见形式如 式3,其中 [Math] 、 [Math] 是值域非负的激活函数。那么如何选取这个激活函数呢?Performer告诉我们,应该选择指数函数 [公式] 首先,我们来看它跟已有的结果有什么不一样。在 Transformers are RNNs 给出的选择是: [公式] 我们知道 1+x 正是 e^x 在 x=0 处的一阶泰勒展开,因此 [Math] 这个选择其实已经相当接近 ...
NLP
2026-01-11
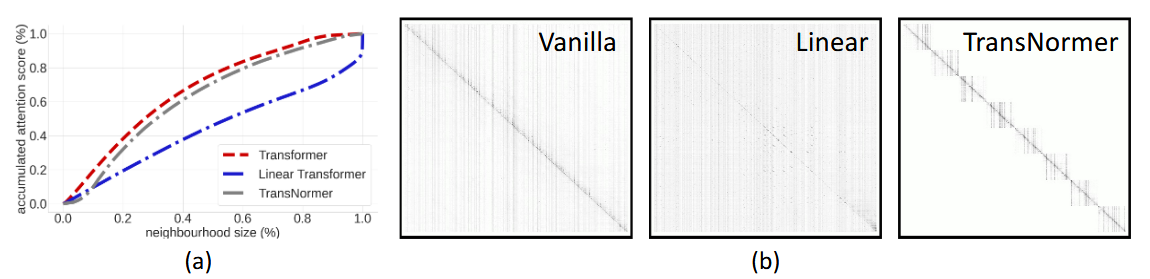
简介 承接 Transformers are RNNs 这篇论文 目的: 为了分析之前linear transformer的效果为什么不好。发现主要是两个原因造成的: 1. 无界梯度(unbounded gradient),会导致模型在训练时不稳定,收敛不好; 1. 注意力稀释(attention dilution),transformer在lower level时应该更关注局部特征,而higher level更关注全局特征,但线性transformer中的attention往往weight 更均匀化,不能聚焦在local区域上,因此称为attention稀释。 解决方案: 1. 对linear attention算出来的output接着做个normalization,形成NormForme...
01背包 描述 有N件物品和一个容量为V的背包。 第i件物品的体积是vi,价值是wi。 求解将哪些物品装入背包,可使这些物品的总体积不超过背包流量,且总价值最大。 二维动态规划 f[i][j] 表示只看前i个物品,总体积是j的情况下,总价值最大是多少。 result = max(f[n][0V]) f[i][j]: 不选第i个物品:f[i][j] = f[i1][j]; 选第i个物品:f[i][j] = f[i1][jv[i]] + w[i](v[i]是第i个物品的体积) 两者之间取最大。 初始化:f[0][0] = 0 代码如下: [代码] 一维动态优化 从上面二维的情况来看,f[i] 只与f[i1]相关,因此只用使用一个一维数组[0v]来存储前一个状态。那么如何来实现呢? 第一个问题:状...
Algorithm
2026-01-11
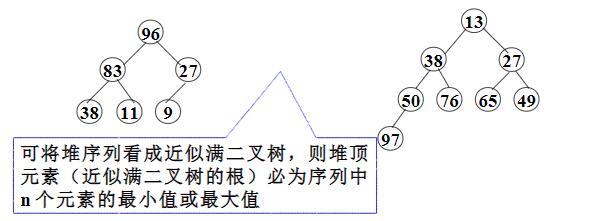
起步 heapq 模块实现了适用于Python列表的最小堆排序算法。 堆是一个树状的数据结构,其中的子节点都与父母排序顺序关系。因为堆排序中的树是满二叉树,因此可以用列表来表示树的结构,使得元素 N 的子元素位于 2N + 1 和 2N + 2 的位置(对于从零开始的索引)。 本文内容将分为三个部分,第一个部分简单介绍 heapq 模块的使用;第二部分回顾堆排序算法;第三部分分析heapq中的实现。 heapq 的使用 创建堆有两个基本的方法:heappush() 和 heapify(),取出堆顶元素用 heappop()。 heappush() 是用来向已有的堆中添加元素,一般从空列表开始构建: [代码] 如果数据已经在列表中,则使用 heapify() 进行重排: [代码] 回顾堆排序算...