简介 生成对抗网络 ( Generative Adversarial Network, GAN ) 是由 Goodfellow 于 2014 年提出的一种对抗网络。这个网络框架包含两个部分,一个生成模型 (generative model) 和一个判别模型 (discriminative model)。其中,生成模型可以理解为一个伪造者,试图通过构造假的数据骗过判别模型的甄别;判别模型可以理解为一个警察,尽可能甄别数据是来自于真实样本还是伪造者构造的假数据。两个模型都通过不断的学习提高自己的能力,即生成模型希望生成更真的假数据骗过判别模型,而判别模型希望能学习如何更准确的识别生成模型的假数据。 网络框架 GAN 由两部分构成,一个 生成器 ( Generator ) 和一个 判别器 ( Discriminator )。对于生成器,我们需要学习关于数据 \(x\) 的一个分布 \(p_g\) ,首先定义一个输入数据的先验分布 \(p_z(z)\) ,其次定义一个映射 \(G \left(\boldsymbol{z}; \theta_g\right): \boldsymbol{z}...
Generative Model
2026-04-15
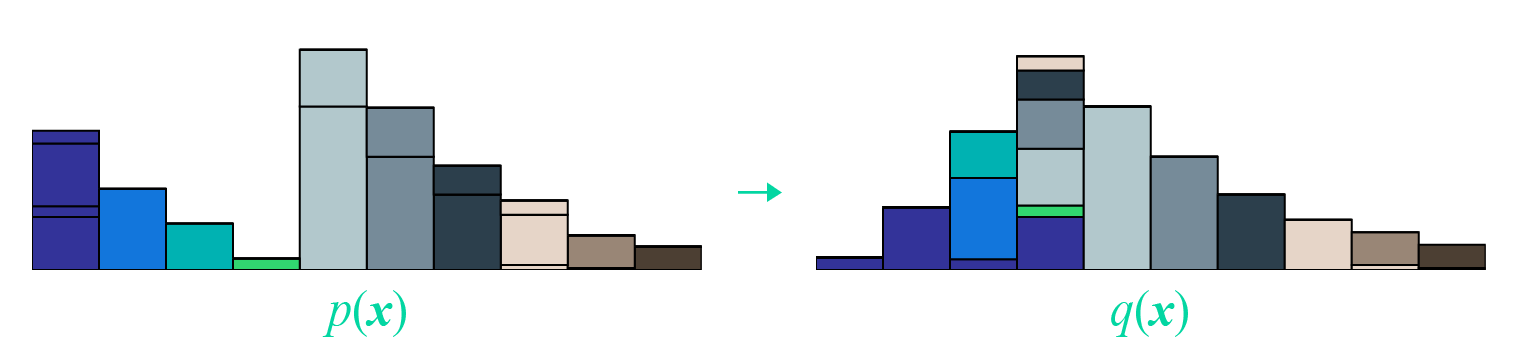
本文受启发于著名的国外博文 《Wasserstein GAN and the Kantorovich-Rubinstein Duality》 ,内容跟它大体上相同,但是删除了一些冗余的部分,对不够充分或者含糊不清的地方作了补充。 Wasserstein距离 显然,整篇文章必然围绕着Wasserstein距离( \(\mathcal{W}\) 距离)来展开。假设我们有了两个概率分布 \(p(x),q(x)\) ,那么Wasserstein距离的定义为 \[\mathcal{W}[p,q]=\inf_{\gamma\in \Pi[p,q]} \iint \gamma(\boldsymbol{x},\boldsymbol{y}) d(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x}d\boldsymbol{y}\] 事实上,这也算是最优传输理论中最核心的定义了。 成本函数 首先 \(d(x,y)\) ,它不一定是距离,其准确含义应该是一个成本函数,代表着从 \(x\) 运输到 \(y\) 的成本。常用的 \(d\) 是基于 \(l\)...
Generative Model
2026-04-15

2022年中旬,以扩散模型为核心的图像生成模型将AI绘画带入了大众的视野。实际上,在更早的一年之前,就有了一个能根据文字生成高清图片的模型——VQGAN。VQGAN不仅本身具有强大的图像生成能力,更是传承了前作VQVAE把图像压缩成离散编码的思想,推广了「先压缩,再生成」的两阶段图像生成思路,启发了无数后续工作。 VQGAN 核心思想 VQGAN的论文名为 Taming Transformers for High-Resolution Image Synthesis,直译过来是「驯服Transformer模型以实现高清图像合成」。可以看出,该方法是在用Transformer生成图像。可是,为什么这个模型叫做VQGAN,是一个GAN呢?这是因为,VQGAN使用了两阶段的图像生成方法: 训练时,先训练一个图像压缩模型(包括编码器和解码器两个子模型),再训练一个生成压缩图像的模型。 生成时, 先用第二个模型生成出一个压缩图像,再用第一个模型复原成真实图像 。 其中,第一个图像压缩模型叫做VQGAN,第二个压缩图像生成模型是一个基于Transformer的模型。...
Generative Model
2026-04-15
Score based generative model SMLD的关键点: 以多个不同量级的噪声对数据进行扰动,并训练一个分数网络来估计不同噪声下的分数 加噪的量级有大有小,都是在原始数据上进行加噪,最终的分布趋向于 $\mathcal{N}(0,max_i{\sigma_i^2})$ 运用分数匹配的方式来训练基于U-Net结构的MCSN网络, 使得MCSN能够估计任意加噪后分布的分数 基于任意加噪分布的分数和退火的郎之万动力学应用到采样来生成准确的原始数据分布的新样本 正式开始介绍之前首先解答一下这个问题: score-based 模型是什么东西,微分方程在这个模型里到底有什么用? 我们知道生成模型基本都是从某个现有的分布中进行采样得到生成的样本,为此模型需要完成对分布的建模。根据建模方式的不同可以分为隐式建模(例如 GAN、diffusion models)和显式建模(例如 VAE、normalizing flows)。和上述的模型相同,score-based 模型也是用一定方式对分布进行了建模。具体而言,这类模型建模的对象是概率分布函数 log 的梯度,也就是 score...
3D Model
2026-04-15
整体流程 # 文件夹biaoding处理加crop以及生成.yml系列文件,保存在calib_params以及biaoding_pipeline文件夹中
0_test_calibprocess.sh
# 内参标定,往往需要多天数据,且要保证标定板出现的多样性以及cover大部分区域
1_calib_intrics.sh
# 外参标定,使用混合的内参对单天数据进行外参标定,最好loss在0.000x
1_calib_extrics.sh
# 修改anchor.yaml相机信息进行15标定,loss 100以下,A88参考为50左右
2_test_merge.sh
# 选择数据送标anchor,返回后, loss 0.00x, 不准基本就是anchor标错或者方向盘等位置发生运动
python tools/display_tags.py --anchor_path /mnt/.../anchor
3_test_anchors.sh
# 检查anchor的3d位置是否正确
# 首先根据点位加入颜色
python 3_addcolor_anchor.py
#...
Generative Model
2026-04-15

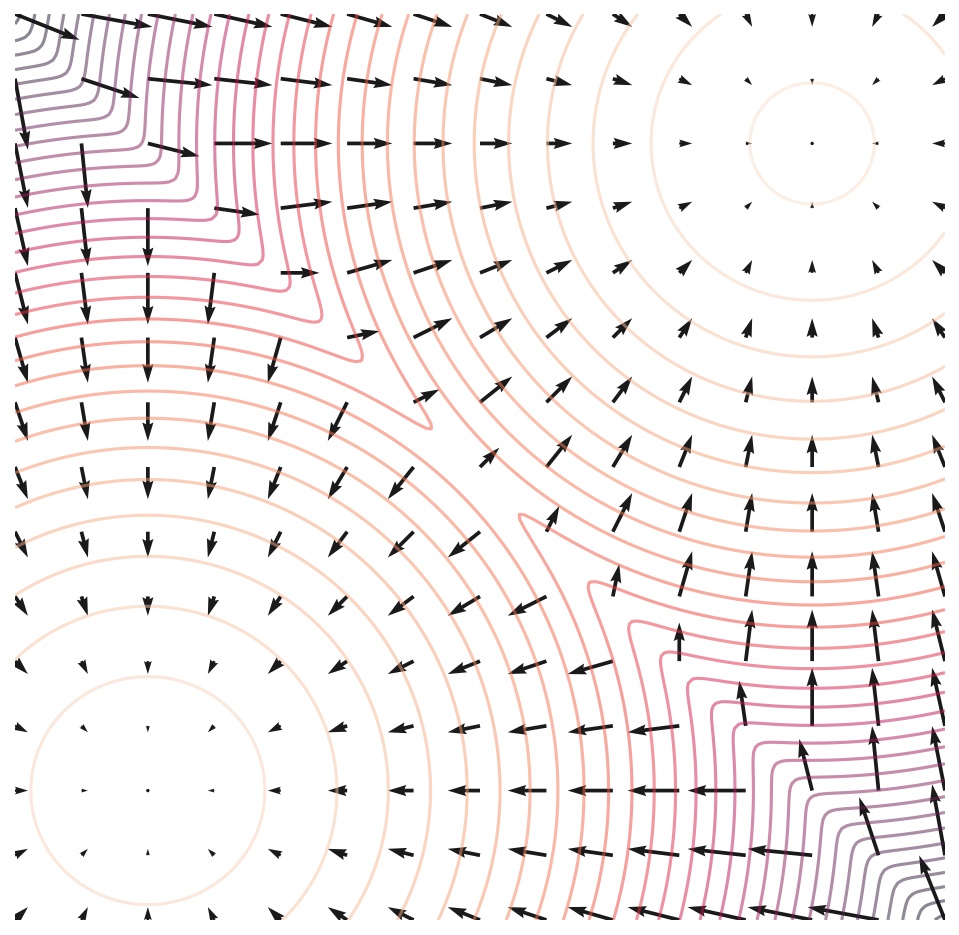
Diffusion Models from SDE 连续扩散模型 (Continuous Diffusion Models) 将传统的离散时间扩散过程扩展到连续时间域,可以被视为一个随机过程,使用随机微分方程(SDE)来描述。其前向过程可以写成如下形式: \[\mathrm d\mathbf x=\mathbf f(\mathbf x,t)\mathrm dt+g(t)\mathrm d\mathbf w\tag{1}\] 其中, \(f(x,t)\) 可以看成偏移系数, \(g(t)\) 可以看成是扩散系数, \(dw\) 是标准布朗运动。这个SDE 描述了数据在连续时间域内如何被噪声逐渐破坏。 这个随机过程的 逆向过程 存在(更准确的描述:下面的逆向时间SDE具有 与正向过程SDE相同的联合分布 )为 \[d\mathbf{x}=[\mathbf{f}(\mathbf{x},t)-g^2(t)\nabla_{\mathbf{x}}\log p_t(\mathbf{x})]dt+g(t)d\bar{\mathbf{w}}\tag{2}\]...
3D Model
2026-04-15

概述 问题定义 广义的 Gaze Estimation 泛指与眼球、眼动、视线等相关的研究,因此有不少做 saliency 和 egocentric 的论文也以 gaze 为关键词。而本文介绍的 Gaze Estimation 主要以眼睛图像或人脸图像为处理对象,估算人的视线方向或注视点位置, 如下图所示。 gaze角度的表示一般使用一个3d向量作为表示,也可以转换为pitch 和yaw角度,具体可参考 欧拉角、旋转矩阵、旋转向量、四元数 Model Gaze模型一般使用回归模型,所以这里基本只介绍一些在gaze model中使用的小技巧 Rle Loss RLE Loss 实际问题 Gaze采集标定方案

论文地址: https://arxiv.org/pdf/2107.11291 代码地址: https://github.com/Jeff-sjtu/res-loglikelihood-regression 前言 一般来说, 我们可以把姿态估计任务分成两个流派:Heatmap-based和Regression-based。 其主要区别在于监督信息的不同,Heatmap-based方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或soft-argmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression-based方法则非常简单粗暴,直接监督模型学习坐标值,计算坐标值的L1或L2...
Large Model
2026-04-15
引言 Structured Generation with LLM,是指 让LLM按照预先定义的schema,输出符合schema的结构化结果 。 常见的应用场景有: 数据处理 。主要功能为a -> b,即从源文本中 抽取/生成 符合schema的结果,例如给定新闻,进行分类、抽取关键词、生成总结等; Agent 。主要功能是Tool Calling,即根据用户query,选择适当的tool和入参。 将 LLM 限制为始终生成符合特定模式的、有效的 JSON 或 YAML,是许多应用的关键功能。 Kor Kor ,一个 基于prompt的技术方案 ;Kor比较适合 数据处理 场景,且原理简单、易于理解,适合作为入门, 并且Kor适用于那些不支持function calling的比较旧的模型。 使用Kor进行structured generation的流程如下: 定义schema,包括结构、注释还有例子; Kor用特定的 prompt template ,将用户提供的schema和待处理的raw text,组装成prompt; 将prompt发送给LLM,借助其通用的In...
Generative Model
2026-04-15

基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Large Model
2026-04-15

引言与背景 FlashAttention的关键创新在于使用类似于在线Softmax的思想来对自注意力计算进行分块(tiling),从而能够融合整个多头注意力层的计算,而无需访问GPU全局内存来存储中间的logits和注意力分数 在深度学习中,Transformer模型的自注意力机制是计算密集型操作。传统实现需要在GPU全局内存中存储大量中间结果,这导致: 内存瓶颈 :中间矩阵占用大量显存 I/O开销 :频繁的全局内存访问降低效率 扩展性限制 :难以处理超长序列 FlashAttention通过算法创新解决了这些问题。 Self-Atention 自注意力机制的计算可以总结为(为简化说明,忽略头数和批次维度,也省略注意力掩码和缩放因子 \(\frac{1}{\sqrt{D}}\) ): \[O = \text{softmax}(QK^T)V\] 其中: \(Q, K, V, O\) 都是形状为 \((L, D)\) 的二维矩阵 \(L\) 是序列长度 \(D\) 是每个头的维度(头维度) softmax应用于最后一个维度(列) 标准计算流程, 传统方法将自注意力计算分解为几个阶段:...
Large Model
2026-04-15
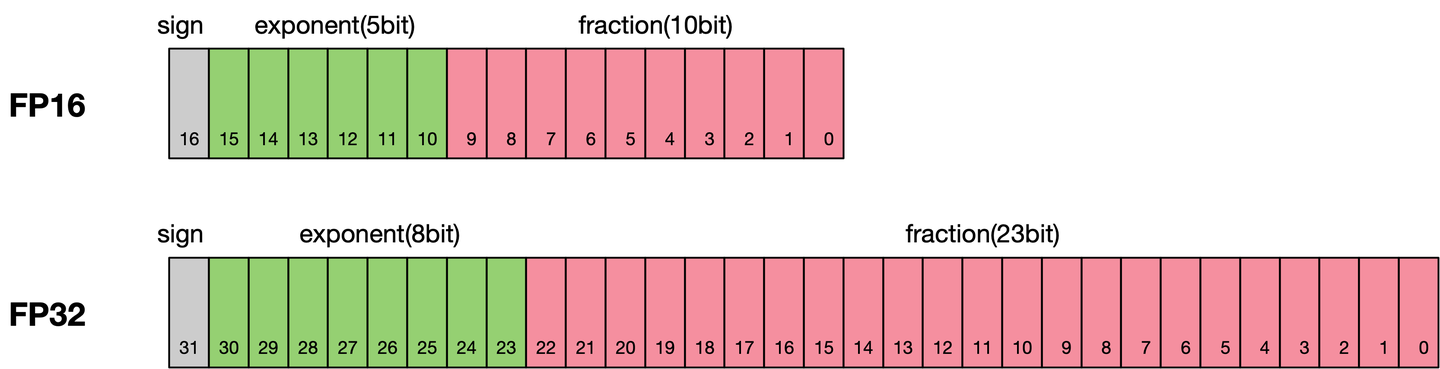
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。 这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16) 。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的位来表示。 FP64表示采用8个字节共64位,来进行的编码存储的一种数据类型; FP32表示采用4个字节共32位来表示; FP16则是采用2字节共16位来表示。 如图所示: 从图中可以看出,与FP32相比,FP16的存储空间是FP32的一半,FP32则是FP16的一半。主要分为三个部分:...