背景 RLHF 通常包括三个阶段: 有监督微调(SFT) RLHF首先通过在高质量数据上进行监督学习来微调预训练的语言模型,得到模型 \(\pi_{SFT}\) 。 奖励建模阶段 (Reward Model) 在第二阶段,SFT模型根据提示 \(x\) 生成答案对 \((y_1, y_2) \sim \pi_{SFT}(y|x)\) 。这些答案对呈现给人类标注者,他们表达对一个答案的偏好,表示为 \(y_w \succ y_l|x\) ,其中 \(y_w\) 和 \(y_l\) 分别表示在 \((y_1, y_2)\) 中更受偏好和不受偏好的答案。 这些偏好被假定由某个潜在的奖励模型 \(r^*(y, x)\) 生成,我们无法直接访问该模型。一种流行的建模偏好的方法是Bradley-Terry(BT)模型,该模型规定人类偏好分布 \(p^*\) 可以写为: \[p^*(y_1 \succ y_2|x) = \frac{\exp(r^*(x, y_1))}{\exp(r^*(x, y_1)) + \exp(r^*(x, y_2))}
\] 假设我们有一个从 \(p^*\)...
Large Model
2026-04-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
Reinforcement Learning
2026-04-15

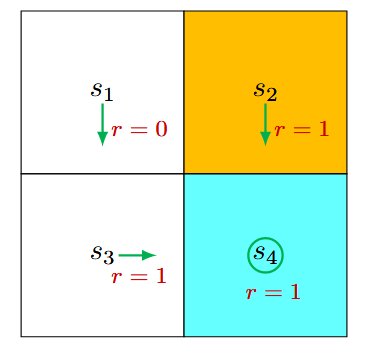
基础概念 Grid-Word Example 环境描述 :网格世界是一个直观的二维环境,包含: 白色格子 :可通行区域。 橙色格子 :禁止进入的区域(禁区)。 目标格子 :代理需要到达的目标位置。 任务目标 : 找到一条“好的”策略,使代理从任意初始位置到达目标格子。 策略应避免进入禁区、碰撞边界或走不必要的弯路。 什么是强化学习:依据策略执行动作-感知状态-得到奖励 所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。 a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment 经典的强化学习模型可以总结为下图的形式(你可以理解为任何强化学习都包含这几个基本部分:智能体、行为、环境、状态、奖励):...
Large Model
2026-04-15

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
NLP
2026-04-15
词向量,英文名叫Word Embedding,按照字面意思,应该是词嵌入。说到词向量,不少读者应该会立马想到Google出品的Word2Vec,大牌效应就是不一样。另外,用Keras之类的框架还有一个Embedding层,也说是将词ID映射为向量。由于先入为主的意识,大家可能就会将词向量跟Word2Vec等同起来,而反过来问“Embedding是哪种词向量?”这类问题,尤其是对于初学者来说,应该是很混淆的。事实上,哪怕对于老手,也不一定能够很好地说清楚。 这一切,还得从one hot说起... 五十步笑百步 one hot,中文可以翻译为“独热”,是最原始的用来表示字、词的方式。为了简单,本文以字为例,词也是类似的。假如词表中有“科、学、空、间、不、错”六个字,one hot就是给这六个字分别用一个0-1编码: \[\begin{array}{c|c}\hline\text{科} & [1, 0, 0, 0, 0, 0]\\
\text{学} & [0, 1, 0, 0, 0, 0]\\
\text{空} & [0, 0, 1, 0, 0, 0]\\
\text{间} &...
NLP
2026-04-15

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4 ,不算太老,而SSM最新最火的变体大概是 Mamba 。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样 RWKV 、 RetNet 还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作 《HiPPO: Recurrent Memory with Optimal Polynomial Projections》 (简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mamba的一作都是 Albert Gu ,他还有很多篇SSM相关的作品,毫不夸张地说,这些工作筑起了SSM大厦的基础。不论SSM前景如何,这种坚持不懈地钻研同一个课题的精神都值得我们由衷地敬佩。 今天,基本上你能叫出的任何语言模型都是 Transformer 模型。OpenAI 的...
Large Model
2026-04-15
引言 Structured Generation with LLM,是指 让LLM按照预先定义的schema,输出符合schema的结构化结果 。 常见的应用场景有: 数据处理 。主要功能为a -> b,即从源文本中 抽取/生成 符合schema的结果,例如给定新闻,进行分类、抽取关键词、生成总结等; Agent 。主要功能是Tool Calling,即根据用户query,选择适当的tool和入参。 将 LLM 限制为始终生成符合特定模式的、有效的 JSON 或 YAML,是许多应用的关键功能。 Kor Kor ,一个 基于prompt的技术方案 ;Kor比较适合 数据处理 场景,且原理简单、易于理解,适合作为入门, 并且Kor适用于那些不支持function calling的比较旧的模型。 使用Kor进行structured generation的流程如下: 定义schema,包括结构、注释还有例子; Kor用特定的 prompt template ,将用户提供的schema和待处理的raw text,组装成prompt; 将prompt发送给LLM,借助其通用的In...
NLP
2026-04-15

这篇文章主要去“复盘”一下主流的长度外推结果,并试图从中发现免训练长度外推的关键之处。 问题定义 顾名思义,免训练长度外推,就是不需要用长序列数据进行额外的训练,只用短序列语料对模型进行训练,就可以得到一个能够处理和预测长序列的模型,即“Train Short, Test Long”。那么如何判断一个模型能否用于长序列呢?最基本的指标就是模型的长序列Loss或者PPL不会爆炸,更加符合实践的评测则是输入足够长的Context,让模型去预测答案,然后跟真实答案做对比,算BLEU、ROUGE等, LongBench 就是就属于这类榜单。 但要注意的是,长度外推应当不以牺牲远程依赖为代价——否则考虑长度外推就没有意义了,倒不如直接截断文本——这意味着通过显式地截断远程依赖的方案都需要谨慎选择,比如ALIBI,还有带显式Decay的 线性RNN ,这些方案当序列长度足够大时都表现为局部注意力,即便有可能实现长度外推,也会有远程依赖不足的风险,需要根据自己的场景斟酌使用。 如何判断在长度外推的同时有没有损失远程依赖呢?比较严谨的是像 ReRoPE...
最优策略(Optimal Policy ) 之前在 贝尔曼方程(Bellman Equation) 中说过, 状态值可以用来评估一个策略是好是坏 ,这里给出正式的概念: \[v_{\pi_1}(s) \geq v_{\pi_2}(s) \quad \text { for all } s \in \mathcal{S}\] 那么此时 \(\pi_1\) 比 \(\pi_2\) ”更好“ 最优状态值(Optimal State Value) : 对于任意状态 \(s\) ,最优状态值 \(v^*(s)\) 是所有可能策略中状态值的最大值: \[v^*(s) = \max_{\pi} v_{\pi}(s)\] 其中 \(v_{\pi}(s)\) 是策略 \(\pi\) 下的状态值。 最优策略(Optimal Policy) : 如果一个策略的状态值在所有状态中均大于或等于其他策略的状态值,则该策略为最优策略: \[\pi^* = \arg\max_{\pi} v_{\pi}(s), \forall s \in S\] 即最优策略总是选择使得状态值最大的动作。 性质 : 存在性...
Reinforcement Learning
2026-04-15
状态价值(State values) 定义 状态价值是强化学习中的核心概念,用于衡量Agent从某个状态出发、遵循特定策略后所能获得的期望回报。 数学表达为: \[
v_\pi(s) = \mathbb{E}[G_t | S_t = s]
\tag{1}\] 其中: \(v_\pi(s)\) :状态 \(s\) 的状态价值函数(state-value function) 或者简称为 状态价值(state value); \(\pi\) :智能体遵循的策略; \(G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \dots\) :从当前时间步 \(t\) 开始的折扣回报; \(\gamma \in (0, 1)\) :折扣因子,用于平衡即时奖励和未来奖励。 状态价值的特点 依赖于状态 \(s\) :状态价值是条件期望,条件是智能体从状态 \(s\) 开始。 依赖于策略 \(\pi\) :不同策略会生成不同的轨迹,从而影响状态价值。 与时间步无关 :状态价值是一个固定值,与当前时间步 \(t\) 无关。 代表一个状态的价值。...
Reinforcement Learning
2026-04-15

引言 时序差分(Temporal-Difference,TD)方法是强化学习中的一类核心算法,它结合了动态规划与蒙特卡洛方法的优点。TD方法是无模型(model-free)学习方法,不需要环境模型即可学习价值函数和最优策略。 TD方法的核心特点是通过比较不同时间步骤的估计值之间的差异来更新价值函数,这种差异被称为"时序差分误差"(TD error)。TD方法可以被视为解决贝尔曼方程或贝尔曼最优方程的特殊随机逼近算法。 基础TD算法:状态值函数学习 给定策略 \(\pi\) ,基础TD算法用于估计状态值函数 \(v_\pi(s)\) 。假设我们有一些按照策略 \(\pi\) 生成的经验样本 \((s_0, r_1, s_1, ..., s_t, r_{t+1}, s_{t+1}, ...)\) ,TD算法的更新规则为: \[\begin{equation}\begin{aligned}v_{t+1}(s_t) &= v_t(s_t) - \alpha_t(s_t)[v_t(s_t) - (r_{t+1} + \gamma v_t(s_{t+1}))]\\
v_{t+1}(s) &=...
Reinforcement Learning
2026-04-15

概述与理论背景 Actor-Critic方法是强化学习中的一类重要算法, 它巧妙地结合了基于策略(policy-based)和基于价值(value-based)的方法 。在这种结构中, "Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现 。从另一个角度看,Actor-Critic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 Actor-Critic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得Actor-Critic方法成为解决复杂强化学习问题的强大工具。 最简单的Actor-Critic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标量度量 \(J(\theta)\) 来搜索最优策略。其梯度上升算法为: \[\begin{equation}\begin{aligned}\theta_{t+1} &= \theta_t + \alpha\nabla_\theta J(\theta_t)\\&=...