Generative Model
2026-04-15
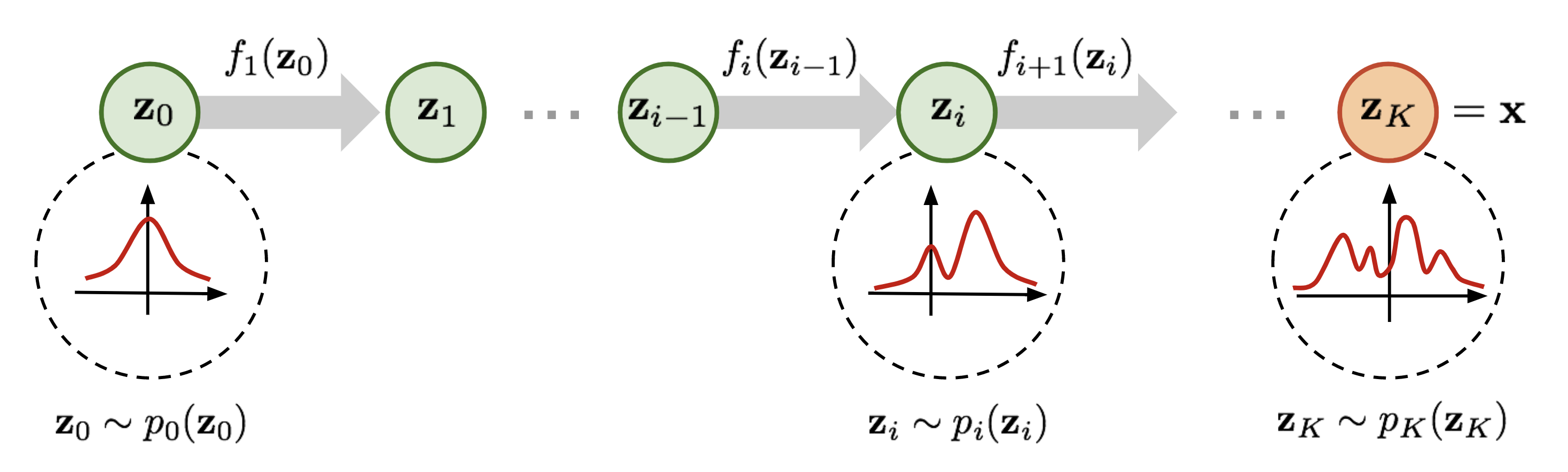
Normalizing flow(标准化流)是一类对概率分布进行建模的工具,它能完成简单的概率分布(例如高斯分布)和任意复杂分布之间的相互转换,经常被用于 data generation、density estimation、inpainting 等任务中,例如 Stability AI 提出的 Stable Diffusion 3 中用到的 rectified flow 就是 normalizing flow 的变体之一。 为了便于理解,在正式开始介绍之前先简要说明一下 normalizing flow 的做法。如上图所示, 为了将一个高斯分布 \(z_0\) 转换为一个复杂的分布 \(z_K\) ,normalizing flow 会对初始的分布 \(z_0\) 进行多次可逆的变换,将其逐渐转换为 \(z_K\) 。由于每一次变换都是可逆的,从 \(z_K\) 出发也能得到高斯分布 \(z_0\) 。这样,我们就实现了复杂分布与高斯分布之间的互相转换,从而能从简单的高斯分布建立任意复杂分布。 对 diffusion models 比较熟悉的读者可能已经发现了,这个过程和...






