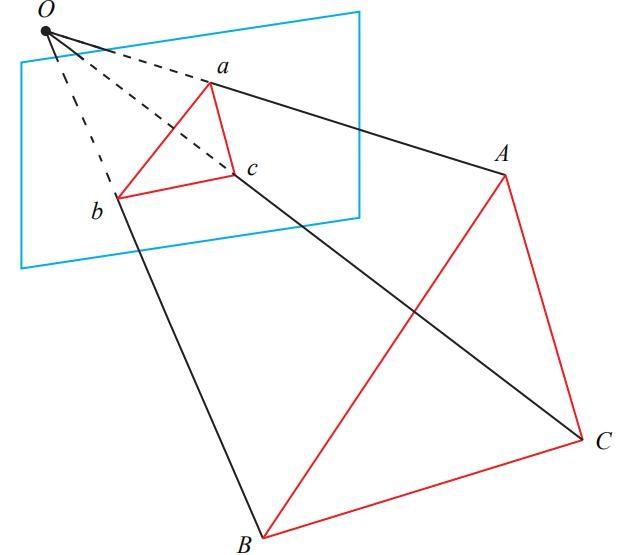
简介 PnP(Perspective-n-Point)是求解3D到2D点对运动的方法,目的是求解相机坐标系相对世界坐标系的位姿。 它描述了已知 \(n\) 个3D点的坐标(相对世界坐标系)以及这些点的像素坐标时,如何估计相机的位姿(即求解世界坐标系到相机坐标系的旋转矩阵 \(R\) 和平移向量 \(t\) )。 用数学公式描述如下: 基本公式: \[\omega \boldsymbol{p}=KP^C=K(R_{CW}\times P^W+t^C_{CW})\] 其中, \(\boldsymbol{p}\) 为点在像素坐标系下的坐标, \(P^C\) 为点在相机坐标系下的坐标, \(P^W\) 为点在世界坐标系下的坐标, \(\omega\) 为点的深度, \(K\) 为相机的内参矩阵, \(R_{CW}\) 和 \(t^C_{CW}\) 为从世界坐标系到相机坐标系的位姿转换。 已知 : \(n\) 个点在 世界坐标系 下的坐标 \(P_1^W,P_2^W,...,P_n^W\) ,这些点相应在 像素坐标系 下的坐标...
3D Model
2026-04-15
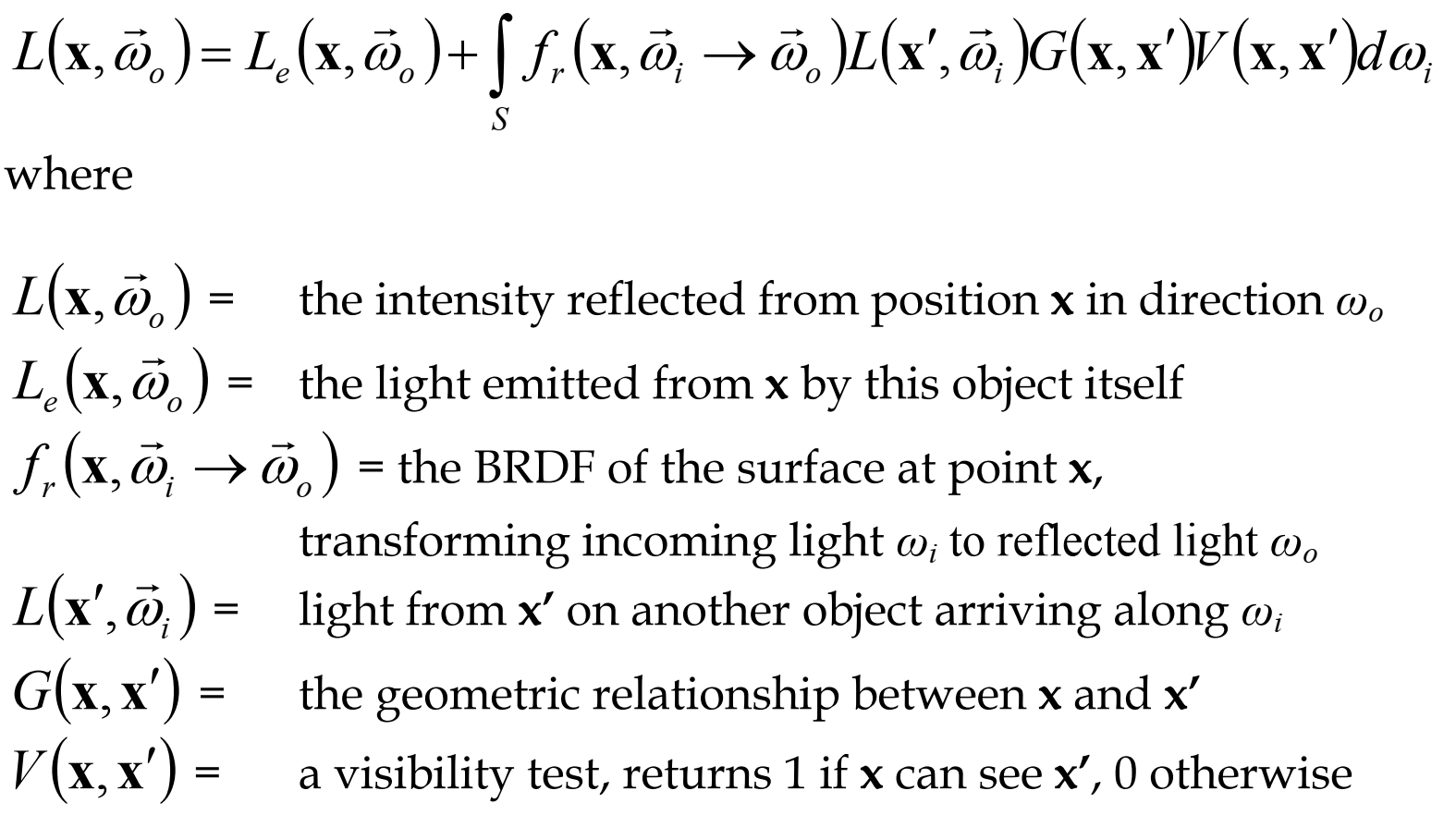
本文主要介绍球谐(Spherical Harmonic,简称SH)函数在光照中的一些计算实现,其内容来自于GDC2003的演讲: Spherical Harmonic Lighting: The Gritty Details 学习总结 球谐函数是一组正交基函数,两两相乘的积分结果是0,而自身相乘的积分结果为1,任意信号都可以通过与球谐函数相乘积分算出其在对应球谐函数上的系数,这个过程可以看成是信号在球谐函数上的投影, 通过多个球谐函数按照对应系数累加可以得到原始信号的模拟,参与模拟的球谐函数阶数越高,模拟精度也就越高。 球面坐标系( \(\theta, \phi\) )下面的球谐函数可以表示任意点到球心的距离,而这个距离也可以解读成强度,从而可以用于实现某点处各个方向上的输入光强。 同时,每个点处的输入光强与输出光强的转换关系(BRDF之类)也可以使用球谐函数来表示,实际光照就是上述两个球谐函数相乘的积分输出 ,而在实际计算中,如果在离线的时候完成两个球谐函数的系数的求取,在运行时只需要一个系数向量点乘即可完成,大大简化了计算量,提升了计算速度。 背景简介 球谐光照(SH...
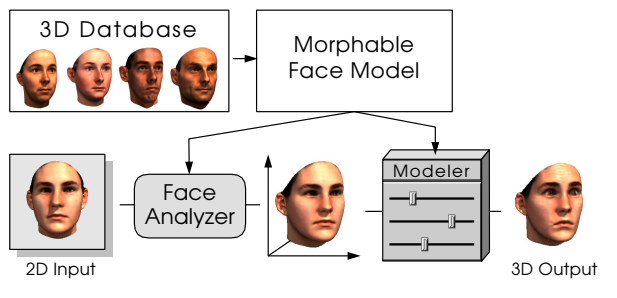
3D Morphable models(简称3DMM),其相关的传统方法和深度学习方法都有较多的研究。 基本思想 3DMM,即三维可变形人脸模型,是一个通用的三维人脸模型,用固定的点数来表示人脸。 它的核心思想就是人脸可以在三维空间中进行一一匹配,并且可以由其他许多幅人脸正交基加权线性相加而来。 我们所处的三维空间,每一点 \((x,y,z)\) ,实际上都是由三维空间三个方向的基量, \((1,0,0)\) , \((0,1,0)\) , \((0,0,1)\) 加权相加所得,只是权重分别为 \(x,y,z\) 。 转换到三维空间,道理也一样。每一个三维的人脸,可以由一个数据库中的所有人脸组成的基向量空间中进行表示,而求解任意三维人脸的模型,实际上等价于求解各个基向量的系数的问题。 人脸的基本属性包括 形状和纹理 ,每一张人脸可以表示为形状向量和纹理向量的线性叠加。 形状向量Shape Vector: \(S=(X1,Y1,Z1,X2,Y2,Z2,...,Yn,Zn)\) ,示意图如下: 纹理向量Texture Vector:...
3D Model
2026-04-15

三维深度学习简介 多视角(multi-view):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性 无序性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
3D Model
2026-04-15

三维空间中的旋转有很多种表示方式,欧拉角,旋转矩阵,旋转向量,四元数。由于在slam与机器人中会大量用到这方面的知识,所以在这里将此方面的知识总结一下,方便以后查阅。 欧拉角(Euler Angle) 欧拉角可以使用滑翔翼飞行器控制来理解,比如对于下面这张图,一般假设红色轴为z轴,则z轴表示空间的第三维,则去掉这一维度表示飞行器在一个二维平面上;蓝色轴为x轴,也是飞行器的朝向,因此绕此轴转动就像是飞行器在做翻滚动作,因此叫翻滚角(roll);绿色轴为y轴,绕这个轴转动其实就是飞机开始准备向上飞或者向下飞了,因此叫俯仰角(pitch);同理,绕红色轴也就是z轴转动代表飞机开始调整自身在二维平面上的朝向了,因此叫偏航角(yaw)。 在欧拉角的表示中,yaw、pitch、roll的顺序对旋转结果是有影响的。即 给定一组欧拉角角度值,比如yaw=45度,pitch=30度,roll=60度,按照yaw-pitch-roll的顺序旋转和按照yaw-roll-pitch的顺序旋转,最终刚体的朝向是不同的! 换言之,若刚体需要按照两种不同的旋转顺序旋转到相同的朝向,所需要的欧拉角角度值则是不同的!...
3D Model
2026-04-15
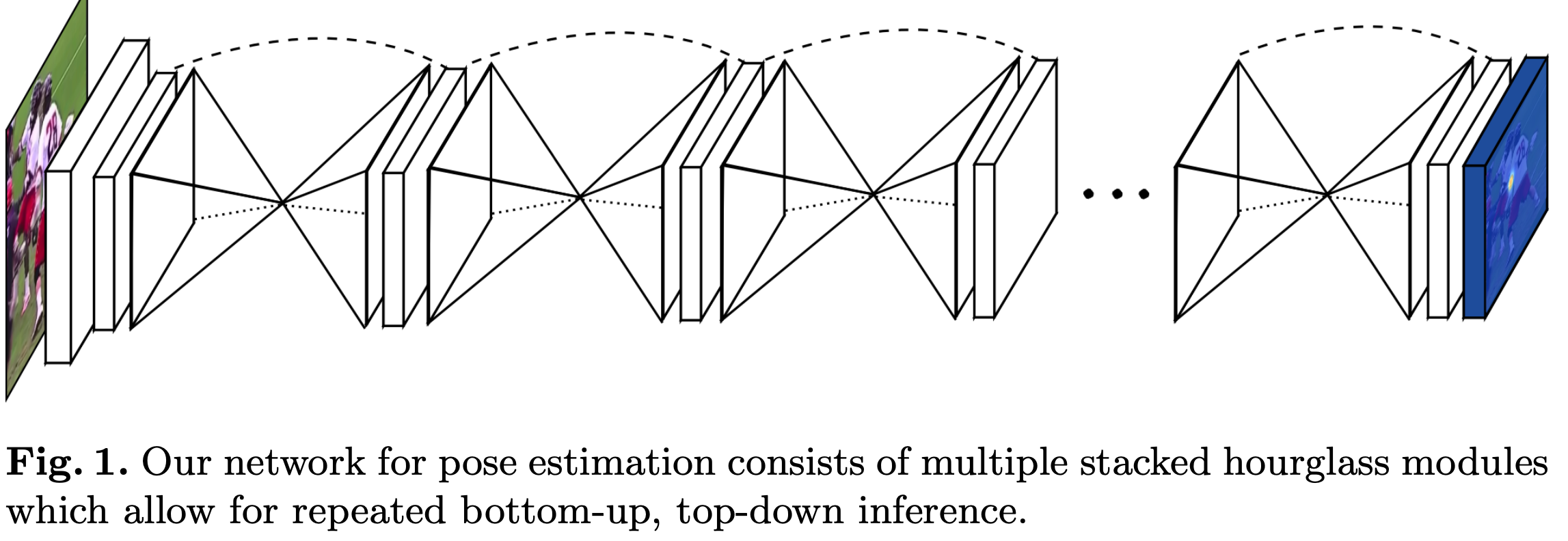
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottom-up、top-down过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottom-up过程将图片从高分辨率降到低分辨率,top-down过程将图片从低分辨率升到高分辨率,这种网络结构包含了许多pooling和upsampling的步骤,pooling可以将图片降到一个很低的分辨率,upsampling可以结合多个分辨率的特征。 下面介绍具体的网络结构。 Hourglass Module...
Generative Model
2026-04-15

1-Rectified Flow 可以认为是 flow matching的ot最优传输形式 Rectified Flow目的是将多对多无约束映射 转变成 一对一有约束映射。 ode会保证路径是“因果”的,也就是避免相交的情况 2-Rectified Flow或者叫Reflow 核心的实际上是加噪过程的样本交点数目降低,交点处模型无法精确学习向量场,交点数少了,模型在每个点预测都更准了,加噪过程是直线,所以能更少步数走到起点(但整体采样过程不是直线) 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE 。 细想上述过程, 可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了 。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程...
3D Model
2026-04-15

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...
Generative Model
2026-04-15

DDPM 有一个非常明显的问题:采样过程很慢。因为 DDPM 的反向过程利用了马尔可夫假设, 所以每次都必须在相邻的时间步之间进行去噪,而不能跳过中间步骤 。原始论文使用了 1000 个时间步,所以我们在采样时也需要循环 1000 次去噪过程,这个过程是非常慢的。 为了加速 DDPM 的采样过程,DDIM 在不利用马尔可夫假设的情况下推导出了 diffusion 的反向过程,最终可以实现仅采样 20~100 步的情况下达到和 DDPM 采样 1000 步相近的生成效果,也就是提速 10~50 倍。这篇文章将对 DDIM 的理论进行讲解,并实现 DDIM 采样的代码。 DDPM 的反向过程 首先我们回顾一下 DDPM 反向过程的推导,为了推导出 \(q(\mathbf{x}_{t-1}|\mathbf{x}_t)\) 这个条件概率分布,DDPM 利用贝叶斯公式将其变成了先验分布的组合, 并且通过向条件中加入 \(\mathbf{x}_0 \) 将所有的分布转换为已知分布 :...
Generative Model
2026-04-15
技术分析 从方法上来看,条件控制生成的方式分两种: 事后修改(Classifier-Guidance)和事前训练(Classifier-Free) 。 对于大多数人来说,一个SOTA级别的扩散模型训练成本太大了,而分类器(Classifier)的训练还能接受,所以就想着直接复用别人训练好的无条件扩散模型,用一个分类器来调整生成过程以实现控制生成,这就是事后修改的Classifier-Guidance方案;而对于“财大气粗”的Google、OpenAI等公司来说,它们不缺数据和算力,所以更倾向于往扩散模型的训练过程中就加入条件信号,达到更好的生成效果,这就是事前训练的Classifier-Free方案。 Classifier-Guidance方案最早出自 《Diffusion Models Beat GANs on Image Synthesis》 ,最初就是用来实现按类生成的;后来 《More Control for Free! Image Synthesis with Semantic Diffusion Guidance》...