补充知识 表示学习 (Representation Learning): 学习数据的表征,以便在构建分类器或其他预测器时更容易提取有用的信息 ,无监督学习也属于表示学习。 互信息 (Mutual Information):表示两个变量 \(X\) 和 \(Y\) 之间的关系,定义为: \[I(X;Y)=\sum_{x\in X}\sum_{y\in Y}p(x,y)log\frac{p(x|y)}{p(x)}\] 对比损失(contrastive loss) :计算成对样本的匹配程度,主要用于降维中。计算公式为: \[L=\frac{1}{2N}\sum_{n-1}^N[yd^2+(1-y)max(margin-d, 0)^2]\] 其中, \(d=\sqrt{(a_n-b_n)^2}\) 为两个样本的欧式距离, \(y=\{0,1\}\) 代表两个样本的匹配程度, \(margin\) 代表设定的阈值。这种损失函数可以很好的表达成对样本的匹配程度,也能够很好用于训练提取特征的模型。当 \( y=1\) (即样本相似)时,损失函数只剩下 \(∑d^2\)...
Self-Supervised
2026-04-15

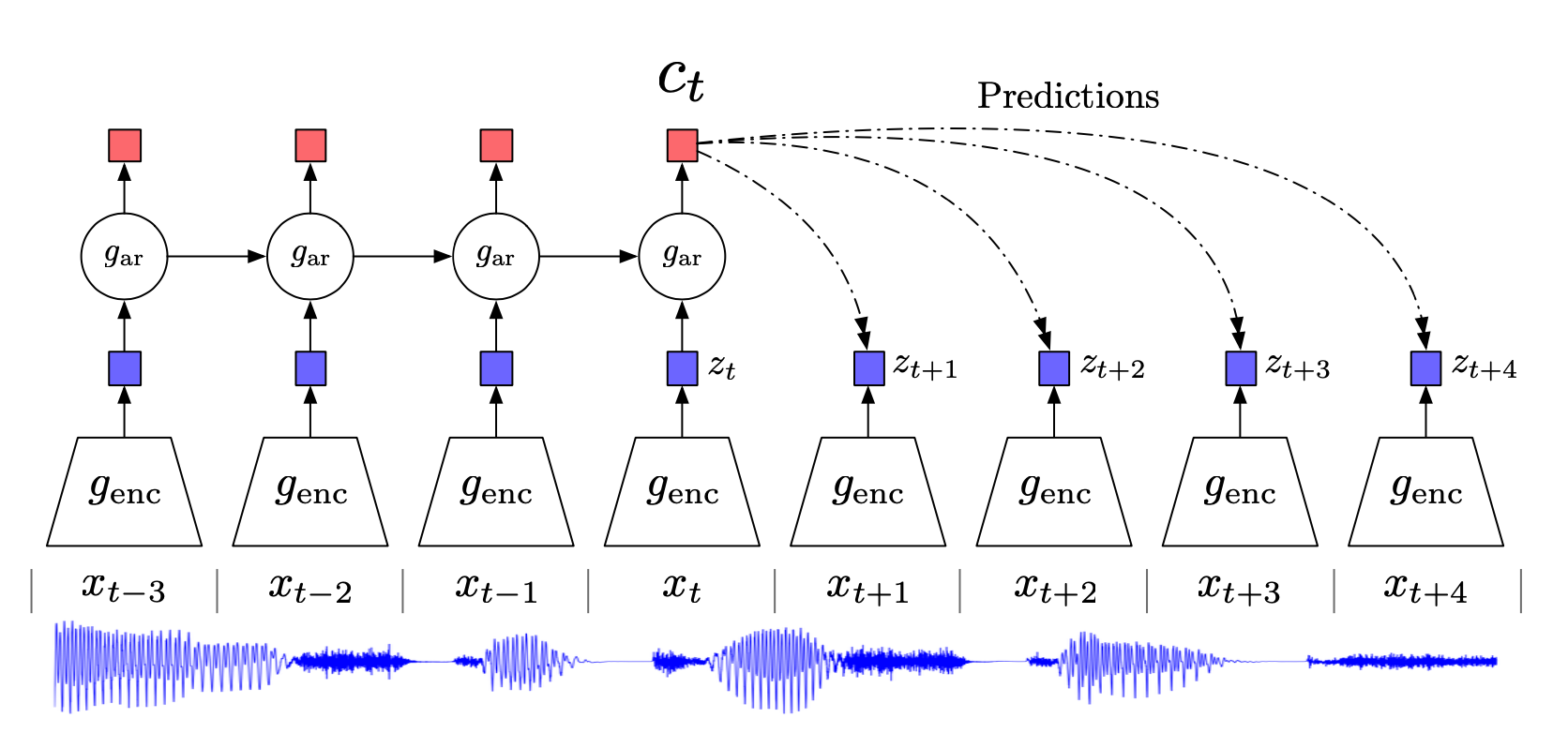
相关内容 自监督学习 (Self-supervised):属于无监督学习,其核心是自动为数据打标签(伪标签或其他角度的可信标签,包括图像的旋转、分块等等),通过让网络按照既定的规则,对数据打出正确的标签来更好地进行特征表示,从而应用于各种下游任务。 互信息 (Mutual Information):表示两个变量 \(X\) 和 \(Y\) 之间的关系,定义为: \[I(X;Y)=\sum_{x\in X}\sum_{y\in Y}p(x,y)log\frac{p(x|y)}{p(x)}\] 噪声对抗估计 (Noise Contrastive Estimation, NCE):在NLP任务中一种降低计算复杂度的方法,将语言模型估计问题简化为一个二分类问题。 Introduction 无监督学习一个重要的问题就是学习有用的 representation,本文的目的就是训练一个 representation learning 函数(即编码器encoder) ,其通过最大编码器输入和输出之间的互信息(MI)来学习对下游任务有用的 representation,而互信息可以通过 MINE...
Self-Supervised
2026-04-15
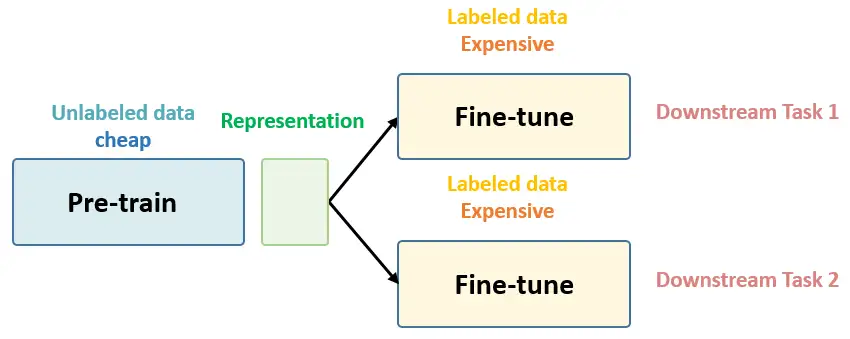
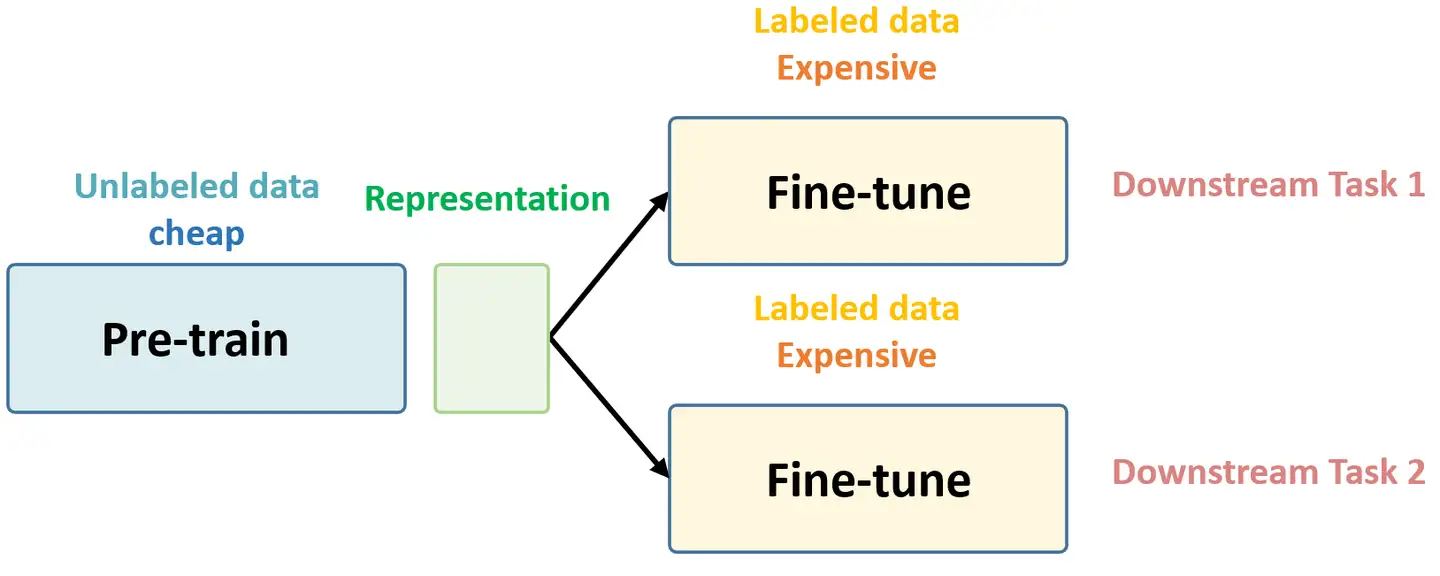
总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵 ,打标签得要多少人工劳力去标注,那成本是相当高的,所以这玩意太贵。相反,无标签的数据集网上随便到处爬,它 便宜 。在训练模型参数的时候,我们不追求把这个参数用带标签数据从 初始化的一张白纸 给一步训练到位,原因就是数据集太贵。于是 Self-Supervised Learning 就想先把参数从 一张白纸 训练到 初步成型 ,再从 初步成型 训练到 完全成型 。注意这是2个阶段。这个 训练到初步成型的东西 ,我们把它叫做 Visual Representation 。预训练模型的时候,就是模型参数从 一张白纸 到 初步成型 的这个过程,还是用无标签数据集。等我把模型参数训练个八九不离十,这时候再根据你 下游任务 (Downstream Tasks) 的不同去用带标签的数据集把参数训练到 完全成型...
Self-Supervised
2026-04-15
Self-Supervised Learning ,又称为自监督学习,我们知道一般机器学习分为有监督学习,无监督学习和强化学习。 而 Self-Supervised Learning 是无监督学习里面的一种,主要是希望能够学习到一种 通用的特征表达 用于 下游任务 (Downstream Tasks) 。 其主要的方式就是通过自己监督自己。作为代表作的 kaiming 的 MoCo 引发一波热议, Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。所以在这个系列中,我会系统地解读 Self-Supervised Learning 的经典工作。 总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 这段话先放在这里,可能你现在还不一定完全理解,后面还会再次提到它。 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵...
Self-Supervised
2026-04-15

如果把 近几年对比学习在视觉领域有代表性的工作做一下总结,那么对比学习的发展历程大概可以分为四个阶段: 百花齐放 这个阶段代表性工作有InstDisc(instance discrimination,)、CPC、CMC等。在这个阶段中,方法、模型、目标函数、代理任务都还没有统一,所以说是一个百花齐放的时代 CV双雄 代表作有MoCo v1、SimCLR v1、MoCo v2、SimCLR v2;CPC、CMC的延伸工作、SwAV等。这个阶段发展非常迅速,有的工作间隔甚至不到一个月,ImageNet上的成绩基本上每个月都在被刷新。 不用负样本 BYOL及其改进工作、SimSiam(CNN在对比学习中的总结性工作) transformer MoCo v3、DINO。这个阶段,无论是对比学习还是最新的掩码学习,都是用Vision Transformer做的。 第一阶段:百花齐放(2018-2019Mid) InstDisc(instance discrimination) 这篇文章提出了个体判别任务(代理任务)以及 memory bank ,非常经典,后人给它的方法起名为InstDisc。...
Computer Vision
2026-04-15
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: Precision-Recall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU>0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU<=0.5的检测框,或者是检测到同一个GT的多余检测框的数量 FN: 没有检测到的GT的数量 mAP的具体计算 由前面定义,我们可以知道,要计算mAP必须先绘出各类别PR曲线,计算出AP。而如何采样PR曲线,VOC采用过两种不同方法。 在VOC2010以前,只需要选取当Recall >= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假设,对于...
Deep Learning
2026-04-15

Random erasing data augmentation 论文名称:Random erasing data augmentation 论文地址: https://arxiv.org/pdf/1708.04896v2.pdf 随机擦除增强,非常容易理解。作者提出的目的主要是模拟遮挡,从而提高模型泛化能力,这种操作其实非常make sense,因为我把物体遮挡一部分后依然能够分类正确,那么肯定会迫使网络利用局部未遮挡的数据进行识别,加大了训练难度,一定程度会提高泛化能力。其也可以被视为add noise的一种,并且与随机裁剪、随机水平翻转具有一定的互补性,综合应用他们,可以取得更好的模型表现,尤其是对噪声和遮挡具有更好的鲁棒性。具体操作就是:随机选择一个区域,然后采用随机值进行覆盖,模拟遮挡场景。 在细节上,可以通过参数控制擦除的面积比例和宽高比,如果随机到指定数目还无法满足设置条件,则强制返回。 一些可视化效果如下: Cutout 论文名称:Improved Regularization of Convolutional Neural Networks with Cutout...
Generative Model
2026-04-15

1-Rectified Flow 可以认为是 flow matching的ot最优传输形式 Rectified Flow目的是将多对多无约束映射 转变成 一对一有约束映射。 ode会保证路径是“因果”的,也就是避免相交的情况 2-Rectified Flow或者叫Reflow 核心的实际上是加噪过程的样本交点数目降低,交点处模型无法精确学习向量场,交点数少了,模型在每个点预测都更准了,加噪过程是直线,所以能更少步数走到起点(但整体采样过程不是直线) 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE 。 细想上述过程, 可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了 。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程...
Generative Model
2026-04-15

DDPM 有一个非常明显的问题:采样过程很慢。因为 DDPM 的反向过程利用了马尔可夫假设, 所以每次都必须在相邻的时间步之间进行去噪,而不能跳过中间步骤 。原始论文使用了 1000 个时间步,所以我们在采样时也需要循环 1000 次去噪过程,这个过程是非常慢的。 为了加速 DDPM 的采样过程,DDIM 在不利用马尔可夫假设的情况下推导出了 diffusion 的反向过程,最终可以实现仅采样 20~100 步的情况下达到和 DDPM 采样 1000 步相近的生成效果,也就是提速 10~50 倍。这篇文章将对 DDIM 的理论进行讲解,并实现 DDIM 采样的代码。 DDPM 的反向过程 首先我们回顾一下 DDPM 反向过程的推导,为了推导出 \(q(\mathbf{x}_{t-1}|\mathbf{x}_t)\) 这个条件概率分布,DDPM 利用贝叶斯公式将其变成了先验分布的组合, 并且通过向条件中加入 \(\mathbf{x}_0 \) 将所有的分布转换为已知分布 :...
Generative Model
2026-04-15
技术分析 从方法上来看,条件控制生成的方式分两种: 事后修改(Classifier-Guidance)和事前训练(Classifier-Free) 。 对于大多数人来说,一个SOTA级别的扩散模型训练成本太大了,而分类器(Classifier)的训练还能接受,所以就想着直接复用别人训练好的无条件扩散模型,用一个分类器来调整生成过程以实现控制生成,这就是事后修改的Classifier-Guidance方案;而对于“财大气粗”的Google、OpenAI等公司来说,它们不缺数据和算力,所以更倾向于往扩散模型的训练过程中就加入条件信号,达到更好的生成效果,这就是事前训练的Classifier-Free方案。 Classifier-Guidance方案最早出自 《Diffusion Models Beat GANs on Image Synthesis》 ,最初就是用来实现按类生成的;后来 《More Control for Free! Image Synthesis with Semantic Diffusion Guidance》...
Generative Model
2026-04-15

Diffusion Models from SDE 连续扩散模型 (Continuous Diffusion Models) 将传统的离散时间扩散过程扩展到连续时间域,可以被视为一个随机过程,使用随机微分方程(SDE)来描述。其前向过程可以写成如下形式: \[\mathrm d\mathbf x=\mathbf f(\mathbf x,t)\mathrm dt+g(t)\mathrm d\mathbf w\tag{1}\] 其中, \(f(x,t)\) 可以看成偏移系数, \(g(t)\) 可以看成是扩散系数, \(dw\) 是标准布朗运动。这个SDE 描述了数据在连续时间域内如何被噪声逐渐破坏。 这个随机过程的 逆向过程 存在(更准确的描述:下面的逆向时间SDE具有 与正向过程SDE相同的联合分布 )为 \[d\mathbf{x}=[\mathbf{f}(\mathbf{x},t)-g^2(t)\nabla_{\mathbf{x}}\log p_t(\mathbf{x})]dt+g(t)d\bar{\mathbf{w}}\tag{2}\]...
Generative Model
2026-04-15

💡 扩散模型:通过加噪的方式去学习原始数据的分布, 从学到的分布中去生成样本 DDPM 关键点: 1. 正向加噪是离散时间马尔可夫链:从 \(x_0\) 逐步加噪得到 \(x_1,x_2,...,x_T\) ;在合适的噪声调度与足够大的 \(T\) 下, \(x_T\) 近似服从 \( N(0,I) \) 的各向同性高斯。 2. 每一步噪声方差 \(β_t\) 满足 \(0<β_t<1\) ,通常随 \(t\) 增大;因此 \(q(x_t|x_{t-1}) \) 的均值缩放系数 \(\sqrt{1-β_t} \) 逐渐减小。 3. 训练通过最大化对数似然的变分下界(ELBO)来学习反向过程 \( p_θ(x_{t-1}|x_t)\) ,并将其参数化为高斯分布(神经网络预测均值/噪声或 score)。 4. 将目标写成 score/DSM 形式时,loss 的权重与对应噪声层的方差尺度(如 \(1-\bar{α}_t\) 或相关量)有关;采样通常是按学习到的反向转移逐步生成(祖先采样),与经典 Langevin MCMC 更新形式不同,但可在 SDE 视角下统一理解。...