泊松分布 日常生活中,大量事件是有固定频率的。 某医院平均每小时出生3个婴儿 某公司平均每10分钟接到1个电话 某超市平均每天销售4包xx牌奶粉 某网站平均每分钟有2次访问 它们的特点就是,我们可以预估这些事件的总数,但是没法知道具体的发生时间。已知平均每小时出生3个婴儿,请问下一个小时,会出生几个? 有可能一下子出生6个,也有可能一个都不出生。这是我们没法知道的。 泊松分布就是描述某段时间内,事件具体的发生概率。 \[P(N(t)=n)=\frac{(\lambda t)^n e^{-\lambda t}}{n!}\] 上面就是泊松分布的公式。等号的左边, \(P\) 表示概率, \(N\) 表示某种函数关系, \(t\) 表示时间, \(n\) 表示数量,1小时内出生3个婴儿的概率,就表示为 \(P(N(1) = 3)\) 。等号的右边,参数λ是单位时间(或单位面积)内随机事件的平均发生率。 接下来两个小时,一个婴儿都不出生的概率是0.25%,基本不可能发生。 \[P(N(2) = 0) = \frac{(3 \times 2)^0 e^{-3 \times 2}}{0!}...
基本概念 方向导数:是一个数;反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的 方向导数 ,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 例子如下: 题目 设二元函数 \( f(x, y) = x^2 + y^2\) ,分别计算此函数在点 \((1, 2)\) 沿方向 \(w=\{3, -4\}\) 与方向 \(u=\{1, 0\}\) 的方向导数。 解: 由于 \(w\) 不是单位向量,因此首先应对其进行单位化: \[v = w^0 = \frac{w}{|w|} = \left\{ \frac{3}{5}, -\frac{4}{5} \right\}\] 计算函数增量: \[\begin{aligned}
\therefore f(x_0 + tv_1,...
Large Model
2026-04-15
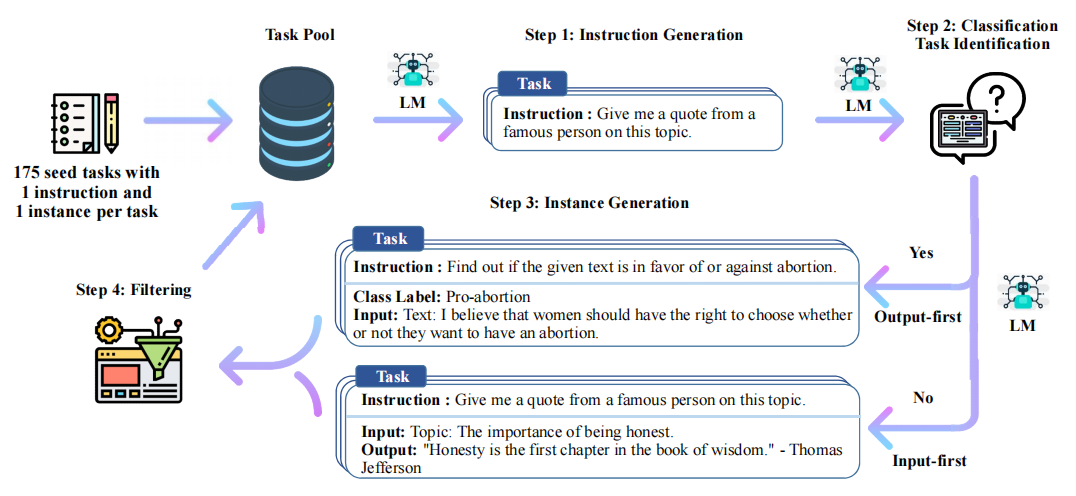
Stanford Alpaca 结合英文语料通过Self Instruct方式微调LLaMA 7B Stanford Alpaca简介 2023年3月中旬,斯坦福的Rohan Taori等人发布Alpaca(中文名:羊驼):号称只花100美元,人人都可微调Meta家70亿参数的LLaMA大模型(即LLaMA 7B), 具体做法是通过52k指令数据,然后在8个80GB A100上训练3个小时,使得Alpaca版的LLaMA 7B在单纯对话上的性能比肩GPT-3.5(text-davinci-003) ,这便是指令调优LLaMA的意义所在 论文《Alpaca: A Strong Open-Source Instruction-Following Model》 GitHub地址: https://github.com/tatsu-lab/stanford_alpaca 数据地址 (即斯坦福团队微调LLaMA 7B所用的52K英文指令数据): raw.githubusercontent.com/tatsu-lab/stanford_alpaca/main/alpaca_data.json...
Large Model
2026-04-15
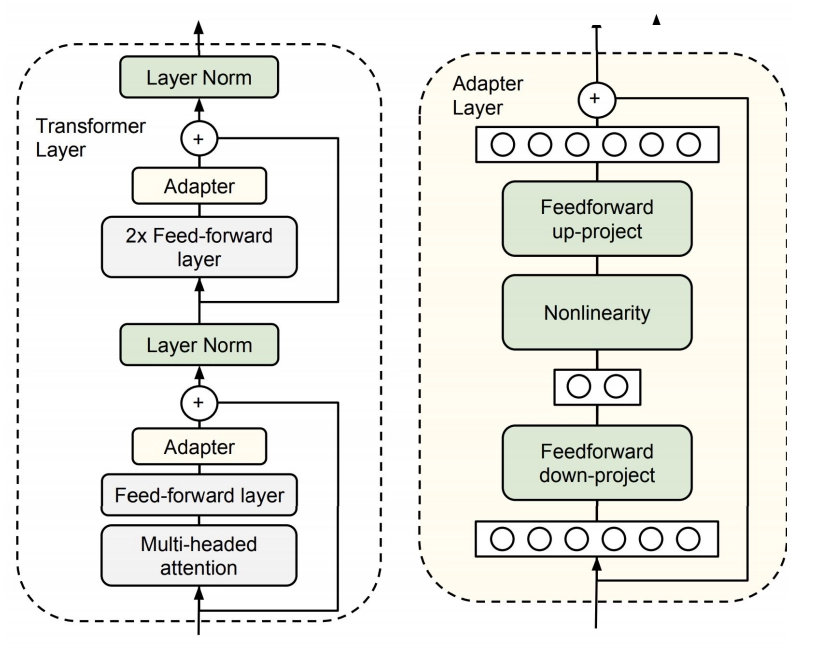
Adapter tuning Adapter Tuning试图在Transformer Layer的Self-Attetion+FFN之后插入一个先降维再升维的MLP(以及一层残差和LayerNormalization)来学习模型微调的知识。 在预训练模型每一层(或某些层)中添加Adapter模块(如上图左侧结构所示),微调时冻结预训练模型主体,由Adapter模块学习特定下游任务的知识。每个Adapter模块由两个前馈子层组成,第一个前馈子层将Transformer块的输出作为输入,将原始输入维度 \(d\) 投影到 \(m\) ,通过控制 \(m\) 的大小来限制Adapter模块的参数量,通常情况下 \(m\ll d\) 。在输出阶段,通过第二个前馈子层还原输入维度,将 \(m\) 重新投影到 \(d\)...
问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 \(t=0\) 时刻它位于原点,每过一秒,它要不向前移动一格( \(+1\) ),要不就向后移动一格( \(-1\) ),问 \(n\) 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维的。)这是一个独立重复实验,每秒的行走可用函数描述为 \(\frac{1}{2}(z+z^{-1})\) ,于是 \(n\) 秒后的运动分布情况可以用 \[\frac{1}{2^n}(z+z^{-1})^n\] 来描述, \(z^i(i=-n,-n+1,\dots,n-1,n)\) 的系数表示粒子位于 \(i\) 的概率。 💡...
Large Model
2026-04-15
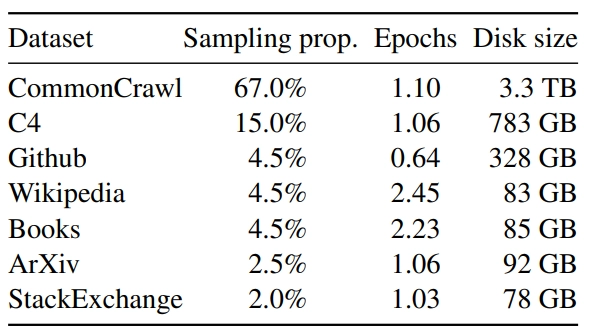
LLaMA 论文名称 :LLaMA: Open and Efficient Foundation Language Models 论文地址: https://arxiv.org/pdf/2302.13971.pdf 代码链接: https://github.com/facebookresearch/llama 模型参数量级的积累,或者训练数据的增加,哪个对性能提升帮助更大? 以 GPT-3 为代表的大语言模型 (Large language models, LLMs) 在海量文本集合上训练,展示出了惊人的涌现能力以及零样本迁移和少样本学习能力。GPT-3 把模型的量级缩放到了 175B,也使得后面的研究工作继续去放大语言模型的量级。大家好像有一个共识,就是: 模型参数量级的增加就会带来同样的性能提升。 但是事实确实如此吗? 最近的 "Training Compute-Optimal Large Language Models" 这篇论文提出一种 缩放定律 (Scaling Law): 训练大语言模型时,在计算成本达到最优情况下,模型大小和训练数据 (token)...
Deep Learning
2026-04-15
一般来说,神经网络处理的东西都是连续的浮点数,标准的输出也是连续型的数字。但实际问题中,我们很多时候都需要一个离散的结果,比如分类问题中我们希望输出正确的类别,“类别”是离散的,“类别的概率”才是连续的;又比如我们很多任务的评测指标实际上都是离散的,比如分类问题的正确率和F1、机器翻译中的BLEU,等等。 还是以分类问题为例,常见的评测指标是正确率,而常见的损失函数是交叉熵。交叉熵的降低与正确率的提升确实会有一定的关联,但它们不是绝对的单调相关关系。换句话说,交叉熵下降了,正确率不一定上升。显然,如果能用正确率的相反数做损失函数,那是最理想的,但正确率是不可导的(涉及到 \(\text{argmax}\) 等操作),所以没法直接用。 这时候一般有两种解决方案;一是动用强化学习,将正确率设为奖励函数,这是“用牛刀杀鸡”的方案; 另外一种是试图给正确率找一个光滑可导的近似公式 。本文就来探讨一下常见的不可导函数的光滑近似,有时候我们称之为“光滑化”,有时候我们也称之为“软化”。 max 后面谈到的大部分内容,基础点就是max操作的光滑近似,我们有:...
Deep Learning
2026-04-15

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
Math
2026-04-15

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
背景 RLHF 通常包括三个阶段: 有监督微调(SFT) RLHF首先通过在高质量数据上进行监督学习来微调预训练的语言模型,得到模型 \(\pi_{SFT}\) 。 奖励建模阶段 (Reward Model) 在第二阶段,SFT模型根据提示 \(x\) 生成答案对 \((y_1, y_2) \sim \pi_{SFT}(y|x)\) 。这些答案对呈现给人类标注者,他们表达对一个答案的偏好,表示为 \(y_w \succ y_l|x\) ,其中 \(y_w\) 和 \(y_l\) 分别表示在 \((y_1, y_2)\) 中更受偏好和不受偏好的答案。 这些偏好被假定由某个潜在的奖励模型 \(r^*(y, x)\) 生成,我们无法直接访问该模型。一种流行的建模偏好的方法是Bradley-Terry(BT)模型,该模型规定人类偏好分布 \(p^*\) 可以写为: \[p^*(y_1 \succ y_2|x) = \frac{\exp(r^*(x, y_1))}{\exp(r^*(x, y_1)) + \exp(r^*(x, y_2))}
\] 假设我们有一个从 \(p^*\)...
Large Model
2026-04-15

简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...
Large Model
2026-04-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...