二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
泊松分布 日常生活中,大量事件是有固定频率的。 某医院平均每小时出生3个婴儿 某公司平均每10分钟接到1个电话 某超市平均每天销售4包xx牌奶粉 某网站平均每分钟有2次访问 它们的特点就是,我们可以预估这些事件的总数,但是没法知道具体的发生时间。已知平均每小时出生3个婴儿,请问下一个小时,会出生几个? 有可能一下子出生6个,也有可能一个都不出生。这是我们没法知道的。 泊松分布就是描述某段时间内,事件具体的发生概率。 \[P(N(t)=n)=\frac{(\lambda t)^n e^{-\lambda t}}{n!}\] 上面就是泊松分布的公式。等号的左边, \(P\) 表示概率, \(N\) 表示某种函数关系, \(t\) 表示时间, \(n\) 表示数量,1小时内出生3个婴儿的概率,就表示为 \(P(N(1) = 3)\) 。等号的右边,参数λ是单位时间(或单位面积)内随机事件的平均发生率。 接下来两个小时,一个婴儿都不出生的概率是0.25%,基本不可能发生。 \[P(N(2) = 0) = \frac{(3 \times 2)^0 e^{-3 \times 2}}{0!}...
基本概念 方向导数:是一个数;反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的 方向导数 ,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 例子如下: 题目 设二元函数 \( f(x, y) = x^2 + y^2\) ,分别计算此函数在点 \((1, 2)\) 沿方向 \(w=\{3, -4\}\) 与方向 \(u=\{1, 0\}\) 的方向导数。 解: 由于 \(w\) 不是单位向量,因此首先应对其进行单位化: \[v = w^0 = \frac{w}{|w|} = \left\{ \frac{3}{5}, -\frac{4}{5} \right\}\] 计算函数增量: \[\begin{aligned}
\therefore f(x_0 + tv_1,...
杂七杂八
2026-04-15
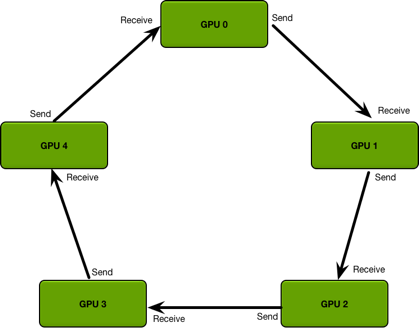
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)>=1.5,python>=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 # Dockerfile# Start FROM Nvidia PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
# FROM nvcr.io/nvidia/pytorch:20.03-py3 代码 单GPU代码 ## main.py文件
import torch
# 构造模型
model = nn.Linear(10, 10).to(local_rank)
# 前向传播
outputs = model(torch.randn(20, 10).to(rank))
labels = torch.randn(20, 10).to(rank)
loss_fn = nn.MSELoss()
loss_fn(outputs, labels).backward()
#...
问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 \(t=0\) 时刻它位于原点,每过一秒,它要不向前移动一格( \(+1\) ),要不就向后移动一格( \(-1\) ),问 \(n\) 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维的。)这是一个独立重复实验,每秒的行走可用函数描述为 \(\frac{1}{2}(z+z^{-1})\) ,于是 \(n\) 秒后的运动分布情况可以用 \[\frac{1}{2^n}(z+z^{-1})^n\] 来描述, \(z^i(i=-n,-n+1,\dots,n-1,n)\) 的系数表示粒子位于 \(i\) 的概率。 💡...
Math
2026-04-15

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
NLP
2026-04-15
概述 HiPPO(High-order Polynomial Projection Operators)是目前大热的structured state space model (S4)及其后续工作的backbone. State space mode主要是控制学科里的内容,最近被引入深度学习领域来解决长距离依赖问题。长距离依赖建模的核心问题是如何通过有限的memory来尽可能记住之前所有的历史信息。当前的主流序列建模模型(即Transformer和RNN) 存在着普遍的遗忘问题 fixed-size context windows: Transformer的window size通常是有限的,一般来说quadratic的attention最多建模到大约10k的token就到计算极限了 vanishing gradient: RNN通过hidden state来存储历史信息,理论上能记住之前所有内容,但实际上的effective memory大概是<1k个token的level,可能的原因是gradient vanishing HiPPO 通过数学方法分析来得到closed-form...