
236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
Generative Model
2026-04-15

背景 本文主要是 《NICE: Non-linear Independent Components Estimation》 一文的介绍和实现。这篇文章也是glow这个模型的基础文章之一,可以说它就是glow的奠基石。 艰难的分布 众所周知,目前主流的生成模型包括VAE和GAN,但事实上除了这两个之外,还有基于flow的模型(flow可以直接翻译为“流”,它的概念我们后面再介绍)。事实上flow的历史和VAE、GAN它们一样悠久,但是flow却鲜为人知。在我看来,大概原因是flow找不到像GAN一样的诸如“造假者-鉴别者”的直观解释吧,因为flow整体偏数学化,加上早期效果没有特别好但计算量又特别大,所以很难让人提起兴趣来。不过现在看来,OpenAI的这个好得让人惊叹的、基于flow的glow模型,估计会让更多的人投入到flow模型的改进中。 glow模型生成的高清人脸 生成模型的本质,就是希望用一个我们知道的概率模型来拟合所给的数据样本, 也就是说,我们得写出一个带参数 \(𝜃\) 的分布 \(q_{\boldsymbol{\theta}}(\boldsymbol{x})\)...
Generative Model
2026-04-15
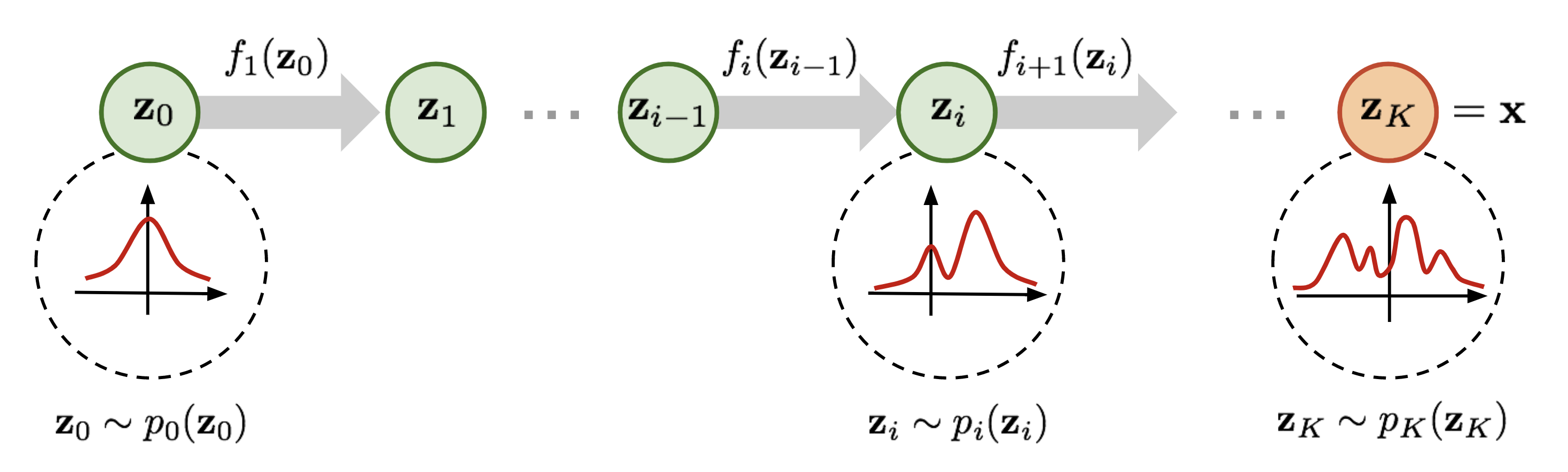
Normalizing flow(标准化流)是一类对概率分布进行建模的工具,它能完成简单的概率分布(例如高斯分布)和任意复杂分布之间的相互转换,经常被用于 data generation、density estimation、inpainting 等任务中,例如 Stability AI 提出的 Stable Diffusion 3 中用到的 rectified flow 就是 normalizing flow 的变体之一。 为了便于理解,在正式开始介绍之前先简要说明一下 normalizing flow 的做法。如上图所示, 为了将一个高斯分布 \(z_0\) 转换为一个复杂的分布 \(z_K\) ,normalizing flow 会对初始的分布 \(z_0\) 进行多次可逆的变换,将其逐渐转换为 \(z_K\) 。由于每一次变换都是可逆的,从 \(z_K\) 出发也能得到高斯分布 \(z_0\) 。这样,我们就实现了复杂分布与高斯分布之间的互相转换,从而能从简单的高斯分布建立任意复杂分布。 对 diffusion models 比较熟悉的读者可能已经发现了,这个过程和...
Generative Model
2026-04-15

1-Rectified Flow 可以认为是 flow matching的ot最优传输形式 Rectified Flow目的是将多对多无约束映射 转变成 一对一有约束映射。 ode会保证路径是“因果”的,也就是避免相交的情况 2-Rectified Flow或者叫Reflow 核心的实际上是加噪过程的样本交点数目降低,交点处模型无法精确学习向量场,交点数少了,模型在每个点预测都更准了,加噪过程是直线,所以能更少步数走到起点(但整体采样过程不是直线) 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE 。 细想上述过程, 可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了 。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程...
Machine Learning
2026-04-15
分类问题 Adaboost 是 Boosting 算法中有代表性的一个。原始的 Adaboost 算法用于解决二分类问题,因此对于一个训练集 \[T = \{\left(x_1, y_1\right), \left(x_2, y_2\right), ..., \left(x_n, y_n\right)\}\] 其中 \(x_i \in \mathcal{X} \subseteq \mathbb{R}^n, y_i \in \mathcal{Y} = \{-1, +1\}\) ,,首先初始化训练集的权重 \[\begin{aligned}
D_1 =& \left(w_{11}, w_{12}, ..., w_{1n}\right) \\
w_{1i} =& \dfrac{1}{n}, i = 1, 2, ..., n
\end{aligned}\] 根据每一轮训练集的权重 \(D_m\) ,对训练集数据进行抽样得到 \(T_m\) ,再根据 \(T_m\) 训练得到每一轮的基学习器 \(h_m\) 。通过计算可以得出基学习器 \(h_m\) 的误差为 \(e_m\) \[e_m =...
Machine Learning
2026-04-15
GBDT (Gradient Boosting Decision Tree) 是另一种基于 Boosting 思想的集成算法,除此之外 GBDT 还有很多其他的叫法,例如:GBM (Gradient Boosting Machine),GBRT (Gradient Boosting Regression Tree),MART (Multiple Additive Regression Tree) 等等。GBDT 算法由 3 个主要概念构成:Gradient Boosting (GB),Regression Decision Tree (DT 或 RT) 和 Shrinkage。 Decision Tree:CART回归树 首先,GBDT使用的决策树是CART回归树,无论是处理回归问题还是二分类以及多分类,GBDT使用的决策树通通都是都是CART回归树。为什么不用CART分类树呢?因为GBDT每次迭代要拟合的是 梯度值...
Machine Learning
2026-04-15

从GBDT到XGBoost 作为GBDT的高效实现,XGBoost是一个上限特别高的算法,因此在算法竞赛中比较受欢迎。简单来说,对比原算法GBDT,XGBoost主要从下面三个方面做了优化: 一是算法本身的优化:在算法的弱学习器模型选择上,对比GBDT只支持决策树,还可以选择很多其他的弱学习器。在算法的损失函数上,除了本身的损失,还加上了正则化部分。在算法的优化方式上,GBDT的损失函数只对误差部分做负梯度(一阶泰勒)展开,而XGBoost损失函数对误差部分做二阶泰勒展开,更加准确。算法本身的优化是我们后面讨论的重点。 二是算法运行效率的优化:对每个弱学习器,比如决策树建立的过程做并行选择,找到合适的子树分裂特征和特征值。在并行选择之前,先对所有的特征的值进行排序分组,方便前面说的并行选择。对分组的特征,选择合适的分组大小,使用CPU缓存进行读取加速。将各个分组保存到多个硬盘以提高IO速度。 三是算法健壮性的优化:对于缺失值的特征,通过枚举所有缺失值在当前节点是进入左子树还是右子树来决定缺失值的处理方式。算法本身加入了L1和L2正则化项,可以防止过拟合,泛化能力更强。...
Machine Learning
2026-04-15

集成学习主要分为以下几类:Bagging,Boosting以及Stacking。 传统机器学习算法 (例如:决策树,人工神经网络,支持向量机,朴素贝叶斯等) 的目标都是寻找一个最优分类器尽可能的将训练数据分开。集成学习 (Ensemble Learning) 算法的基本思想就是将多个分类器组合,从而实现一个预测效果更好的集成分类器。集成算法可以说从一方面验证了中国的一句老话:三个臭皮匠,赛过诸葛亮。 Thomas G. Dietterich 指出了集成算法在统计,计算和表示上的有效原因: 统计上的原因 一个学习算法可以理解为在一个假设空间 H 中选找到一个最好的假设。但是,当训练样本的数据量小到不够用来精确的学习到目标假设时,学习算法可以找到很多满足训练样本的分类器。所以,学习算法选择任何一个分类器都会面临一定错误分类的风险,因此将多个假设集成起来可以降低选择错误分类器的风险。 计算上的原因 很多学习算法在进行最优化搜索时很有可能陷入局部最优的错误中,因此对于学习算法而言很难得到一个全局最优的假设。事实上人工神经网络和决策树已经被证实为是一 个NP...
简介 生成对抗网络 ( Generative Adversarial Network, GAN ) 是由 Goodfellow 于 2014 年提出的一种对抗网络。这个网络框架包含两个部分,一个生成模型 (generative model) 和一个判别模型 (discriminative model)。其中,生成模型可以理解为一个伪造者,试图通过构造假的数据骗过判别模型的甄别;判别模型可以理解为一个警察,尽可能甄别数据是来自于真实样本还是伪造者构造的假数据。两个模型都通过不断的学习提高自己的能力,即生成模型希望生成更真的假数据骗过判别模型,而判别模型希望能学习如何更准确的识别生成模型的假数据。 网络框架 GAN 由两部分构成,一个 生成器 ( Generator ) 和一个 判别器 ( Discriminator )。对于生成器,我们需要学习关于数据 \(x\) 的一个分布 \(p_g\) ,首先定义一个输入数据的先验分布 \(p_z(z)\) ,其次定义一个映射 \(G \left(\boldsymbol{z}; \theta_g\right): \boldsymbol{z}...
Generative Model
2026-04-15
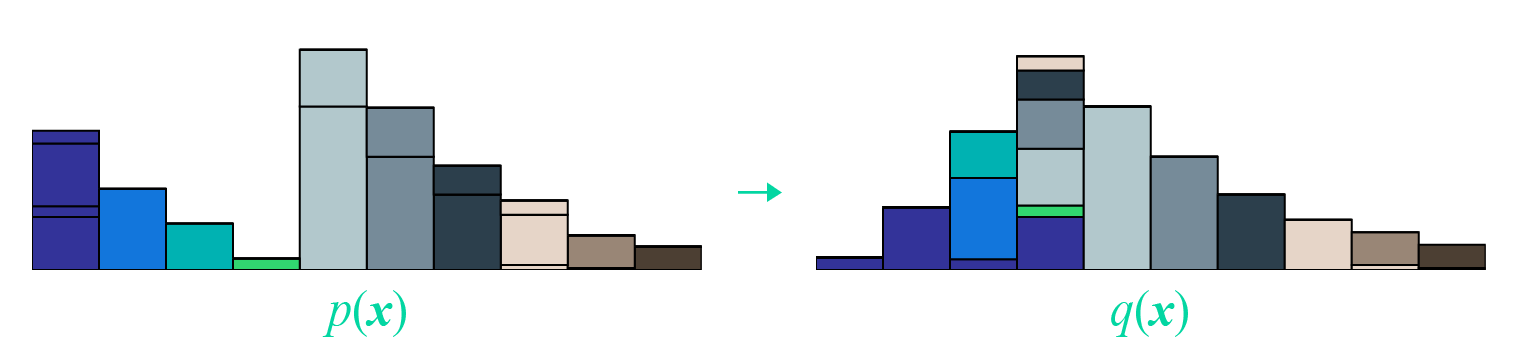
本文受启发于著名的国外博文 《Wasserstein GAN and the Kantorovich-Rubinstein Duality》 ,内容跟它大体上相同,但是删除了一些冗余的部分,对不够充分或者含糊不清的地方作了补充。 Wasserstein距离 显然,整篇文章必然围绕着Wasserstein距离( \(\mathcal{W}\) 距离)来展开。假设我们有了两个概率分布 \(p(x),q(x)\) ,那么Wasserstein距离的定义为 \[\mathcal{W}[p,q]=\inf_{\gamma\in \Pi[p,q]} \iint \gamma(\boldsymbol{x},\boldsymbol{y}) d(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x}d\boldsymbol{y}\] 事实上,这也算是最优传输理论中最核心的定义了。 成本函数 首先 \(d(x,y)\) ,它不一定是距离,其准确含义应该是一个成本函数,代表着从 \(x\) 运输到 \(y\) 的成本。常用的 \(d\) 是基于 \(l\)...