3D Model
2026-04-15
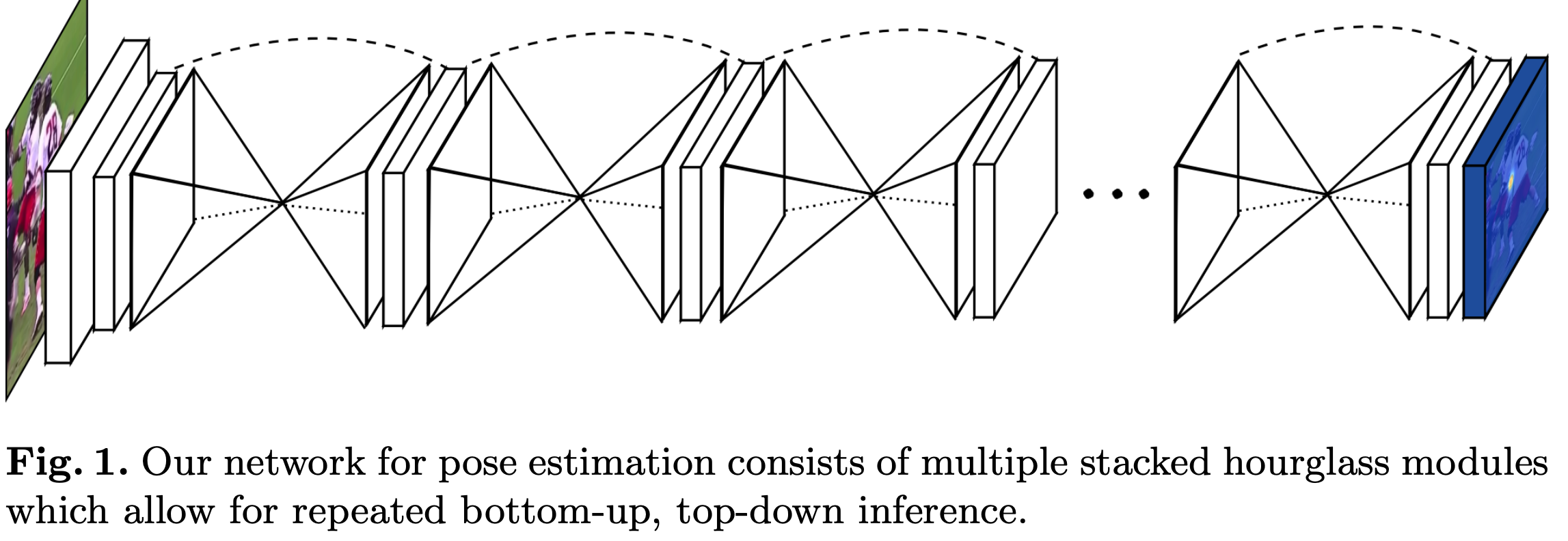
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottom-up、top-down过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottom-up过程将图片从高分辨率降到低分辨率,top-down过程将图片从低分辨率升到高分辨率,这种网络结构包含了许多pooling和upsampling的步骤,pooling可以将图片降到一个很低的分辨率,upsampling可以结合多个分辨率的特征。 下面介绍具体的网络结构。 Hourglass Module...