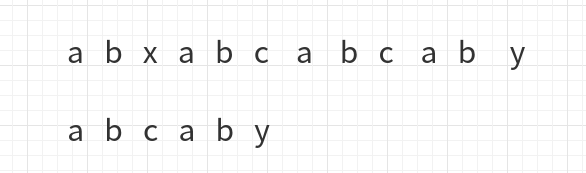
kmp算法用于字符串的模式匹配,也就是找到模式字符串在目标字符串的第一次出现的位置比如 abababc 那么 bab 在其位置1处, bc 在其位置5处,我们首先想到的最简单的办法就是蛮力的一个字符一个字符的匹配,但那样的时间复杂度会是 \(O(m*n)\) 。kmp算法保证了时间复杂度为 \(O(m+n)\) 。 基本原理 举个例子: 发现 x 与 c 不同后,进行移动 a 与 x 不同,再次移动 此时比较到了 c 与 y , 于是下一步移动成了下面这样 这一次的移动与前两次的移动不同,之前每次比较到上面长字符串的字符位置后,直接把模式字符串的首字符与它对齐,这次并没有,原因是这次移动之前, y 与 c 对齐,但是 y 前边的 ab 是与自己的前缀 ab 一样,于是 ab 并不用再比较,直接从第三个位置开始比较,如图: 所以说 kmp算法对于这种情况就直接使用当前比较字符之前的最长相同的前后缀,然后将前缀与上面的长字符串对齐,继续比较后面的字符串 。 这里kmp算法中的一个重要点就来了,如何找到 模式字符串中每位字符之前的最长相同前后缀呢 这里继续用一个例子举例: 下面的数字记录...
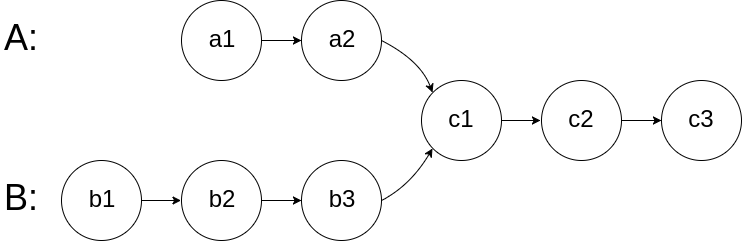
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...
线性结构与技巧 基础容器 数组 (Array) 链表 (Linked List) 字符串 (String) KMP算法 核心技巧 双指针 滑动窗口 二分查找 栈与队列 栈 & 队列 (Stack & Queue) 单调队列 树与图论 树与堆 (Tree & Heap) 树的遍历 二叉树 堆(大顶堆&小顶堆) 优先队列 图 (Graph) 搜索(BFS/DFS) 最小生成树 核心算法思想 动态规划 (DP) 基础 DP 背包问题 排序 基础排序算法 排序算法 数据处理 哈希表 Math

236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
3D Model
2026-04-15
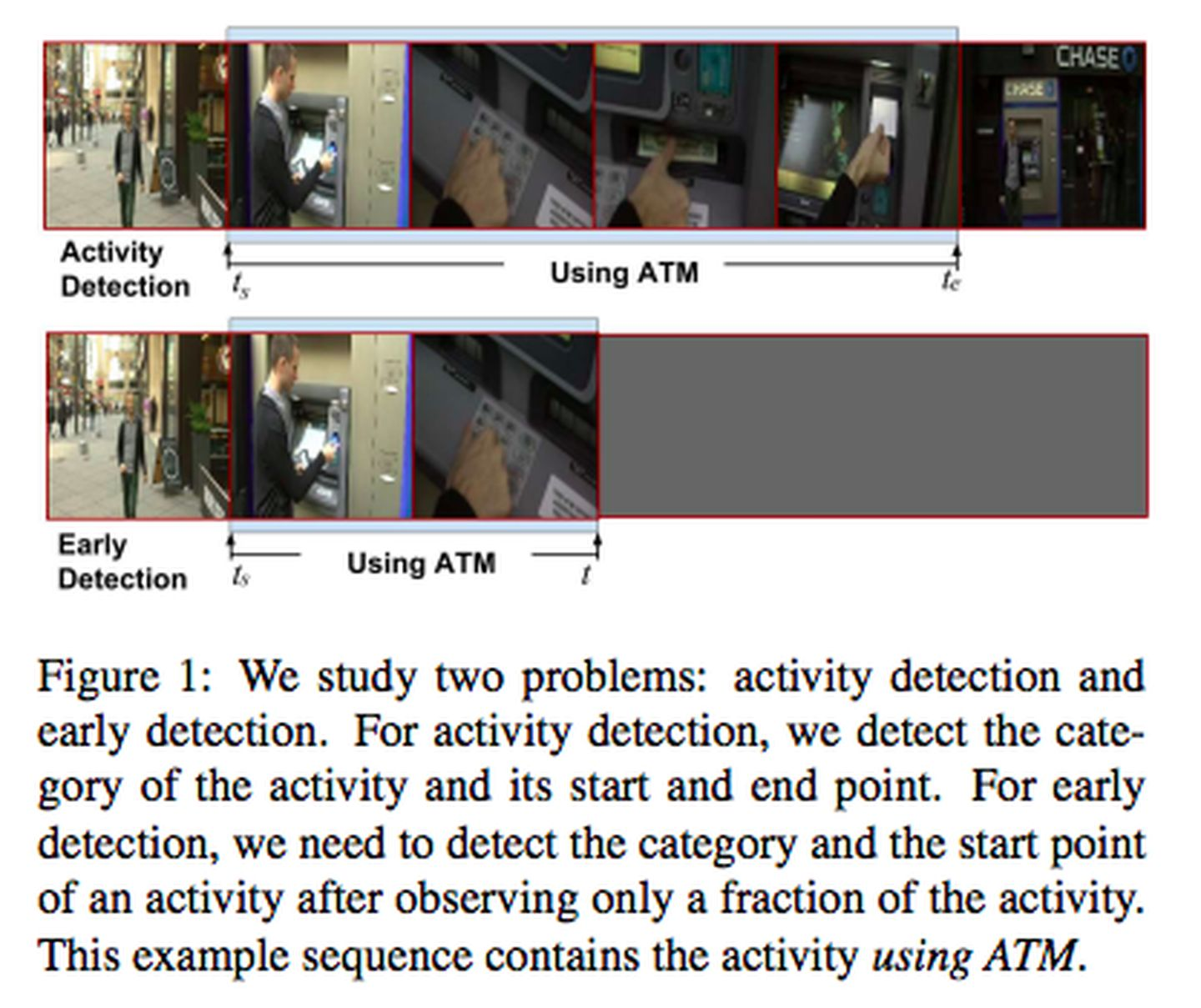
Temporal action detection可以分为两种setting, 一是offline的,在检测时视频是完整可得的,也就是可以利用完整的视频检测动作发生的时间区间(开始时间+结束时间)以及动作的类别; 二是 online的,即处理的是一个视频流,需要在线的检测(or 预测未来)发生的动作类别,但无法知道检测时间点之后的内容。online的问题设定更符合surveillance的需求,需要做实时的检测或者预警;offline的设定更符合视频搜索的需求,比如youtube可能用到的 highlight detection / preview generation。 问题演化 Early action detection -> Online action detection -> Online action anticipation: 在学术界关注online action detection之前,有一个相似的问题叫做 early event detection ,问题定义是 “detect the event as soon as possible, after it...
3D Model
2026-04-15

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 Two-Stream Two-stream convolutional networks 简介 Two-Stream CNN网络顾名思义分为两个部分, 空间流 处理 RGB图像 ,得到形状信息; 时间流/光流 处理 光流图像 ,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,可以采用平均法或者是SVM。不过这两个流都是二维卷积操作。最终联合训练,并分类。 如图所示,其实做法非常的简单,相当于训练两个CNN的分类器。一个是专门对于 RGB 图的, 一个专门对于光流图的, 然后将两者的结果进行一个 fushion 的过程。...
Reinforcement Learning
2026-04-15
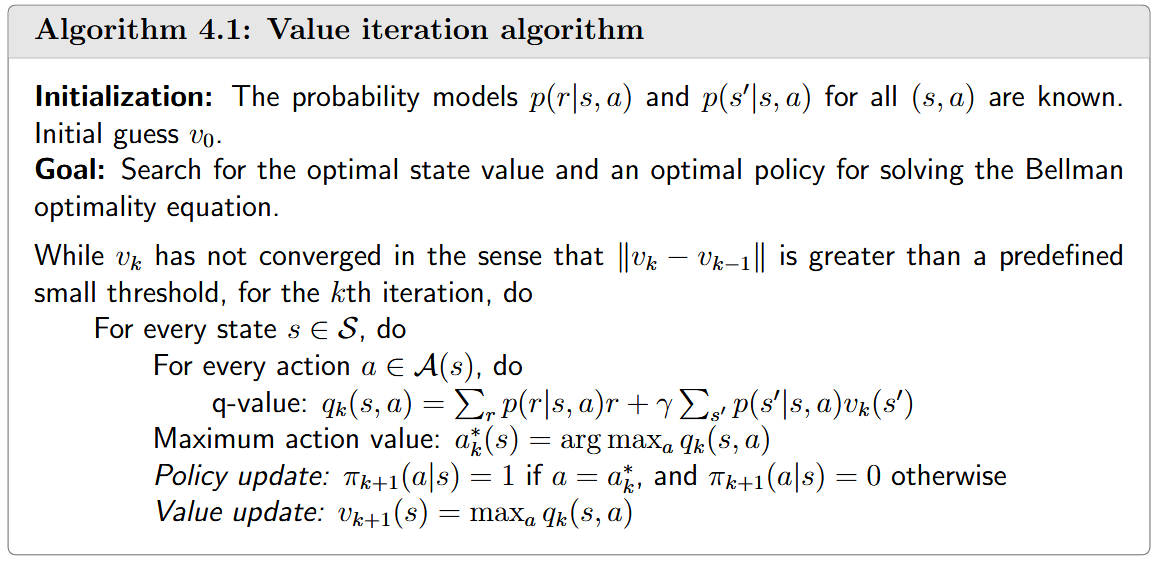
引言 强化学习中,找到最优策略是核心目标。本文详细介绍三种能够找到最优策略的基础算法: 价值迭代、策略迭代和截断策略迭代 。这些算法属于动态规划范畴,需要系统模型,是后续无模型强化学习算法的重要基础。 在强化学习的发展路线中,这些算法处于"基础工具"到"算法/方法"的过渡阶段,是从"有模型"到"无模型"学习的重要桥梁。 价值迭代(Value iteration) 价值迭代算法 基于收缩映射定理求解贝尔曼最优方程 。其核心迭代公式为: \[\begin{equation}v_{k+1} = \max_{\pi \in \Pi} (r_\pi + \gamma P_\pi v_k), k = 0, 1, 2, ...\tag{1}\end{equation}\] 根据收缩映射定理,当 \(k \to \infty\) 时, \(v_k\) 和 \(\pi_k\) 分别收敛到最优状态值和最优策略。 每次迭代包含两个步骤: 策略更新步骤 (policy update step) :找到能解决以下优化问题的策略 \[\pi_{k+1} = \arg\max_\pi (r_\pi +...
Math
2026-04-15

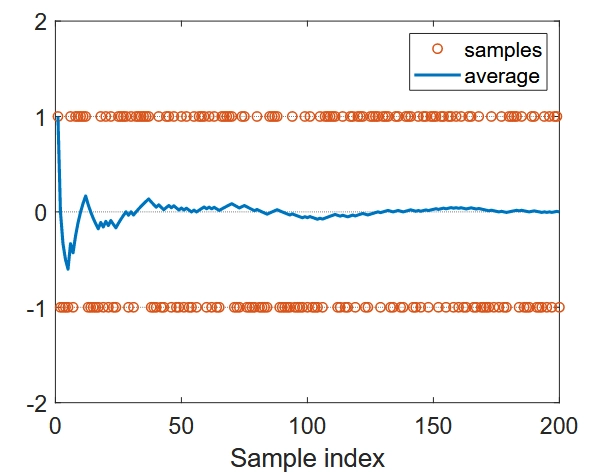
引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
Reinforcement Learning
2026-04-15
引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为: 如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验 。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 \(X\) 中值的随机变量 \(X\) ,我们的任务是计算 \(X\) 的均值或期望值: \(E[X]\) 有两种方法可以计算 \(E[X]\) : 基于模型的方法 :当已知随机变量的概率分布时,可以直接根据期望值的定义计算: \[E[X] = \sum_{x \in X} p(x) \cdot x\] 其中 \(p(x)\) 是 \(X\) 取值为 \(x\)...
Reinforcement Learning
2026-04-15

引言 DDPG同样使用了Actor-Critic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 \(s\) 处,采用的动作 \(\pi_\theta(a|s)\) 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的,即策略变成 \[a = \mu(s, \theta)\] 所以DDPG基于确定性策略梯度(DPG)算法,结合了DQN的成功经验。 使用回放缓冲区中的样本进行离策略训练,以减少样本之间的相关性 使用目标Q网络在时序差分更新过程中提供一致的目标...