Large Model
2026-04-15
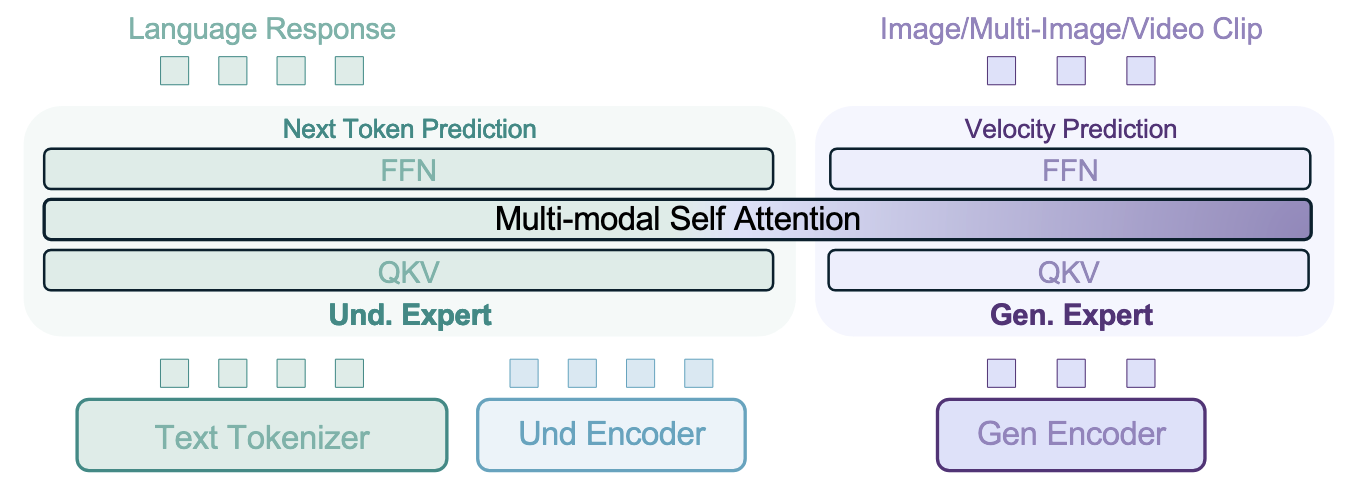
简介 bagel-ai.org BAGEL 模型原生支持统一的多模态理解和生成,是一个 decoder-only 的模型,BAGEL 在包含文本、图像、视频和网络数据的大量多模态数据上进行了预训练,包括数万亿 tokens。尽管有一些研究尝试扩展其统一模型,但它们 主要仍然依赖于标准图像生成和理解任务中的图像-文本配对数据 进行训练。 然而,最近的研究发现,学术模型与 GPT-4o 和 Gemini 2.0 等 专有系统在统一多模态理解和生成方面存在显著差距 ,而这些专有系统的底层技术并未公开。作者认为,弥合这一差距的关键在于 使用精心构建的多模态交错数据进行规模化训练 。这种多模态交错数据 整合了文本、图像、视频和网络来源 。通过使用这种多样化的多模态交错数据进行扩展时,模型展现出 复杂的、新兴的多模态推理能力 。这种规模化不仅增强了核心的多模态理解和生成能力,还促进了 复杂的组合能力 ,例如自由形式的视觉操作和需要长上下文推理的多模态生成。 论文主要贡献: 数据策略创新,融合多源数据。包含: 架构设计理念,采用 Mixture-of-Transformer-Experts...