Large Model
2026-04-15
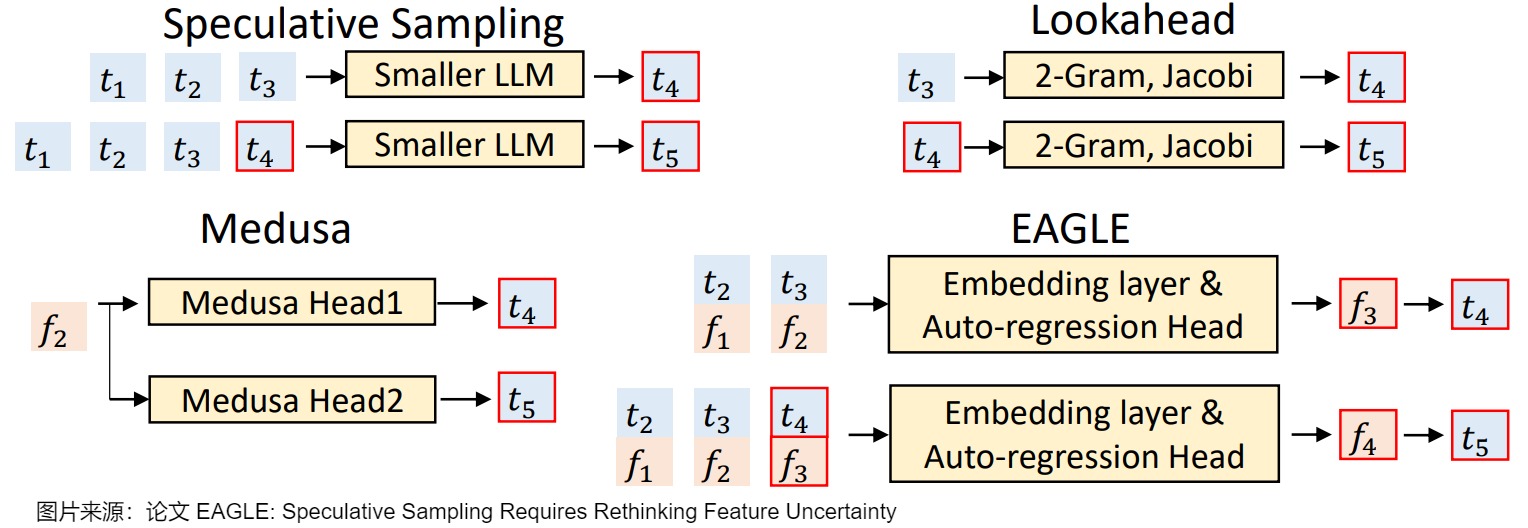
概述 MTP(Multi-token Prediction)的总体思路是:让模型使用n个独立的输出头来预测接下来的n个token,这n个独立的输出头共享同一个模型主干。这样通过解码阶段的优化,将1-token的生成,转变成multi-token的生成,从而提升训练和推理的性能。 在DeepSeek之前也有几个MTP方案,其侧重点各自不同。 侧重推理时解码加速。比如论文“MEDUSA: Simple LLM Inference Acceleration Framework with Multiple Decoding Heads”、论文“EAGLE: Speculative Sampling Requires Rethinking Feature Uncertainty”等。这些方案通过一次生成多个token,实现成倍的加速来提升推理性能。 侧重训练时提高效率。比如论文“Better & Faster Large Language Models via Multi-token...