
概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
Generative Model
2026-04-15
Score based generative model SMLD的关键点: 以多个不同量级的噪声对数据进行扰动,并训练一个分数网络来估计不同噪声下的分数 加噪的量级有大有小,都是在原始数据上进行加噪,最终的分布趋向于 $\mathcal{N}(0,max_i{\sigma_i^2})$ 运用分数匹配的方式来训练基于U-Net结构的MCSN网络, 使得MCSN能够估计任意加噪后分布的分数 基于任意加噪分布的分数和退火的郎之万动力学应用到采样来生成准确的原始数据分布的新样本 正式开始介绍之前首先解答一下这个问题: score-based 模型是什么东西,微分方程在这个模型里到底有什么用? 我们知道生成模型基本都是从某个现有的分布中进行采样得到生成的样本,为此模型需要完成对分布的建模。根据建模方式的不同可以分为隐式建模(例如 GAN、diffusion models)和显式建模(例如 VAE、normalizing flows)。和上述的模型相同,score-based 模型也是用一定方式对分布进行了建模。具体而言,这类模型建模的对象是概率分布函数 log 的梯度,也就是 score...
Large Model
2026-04-15
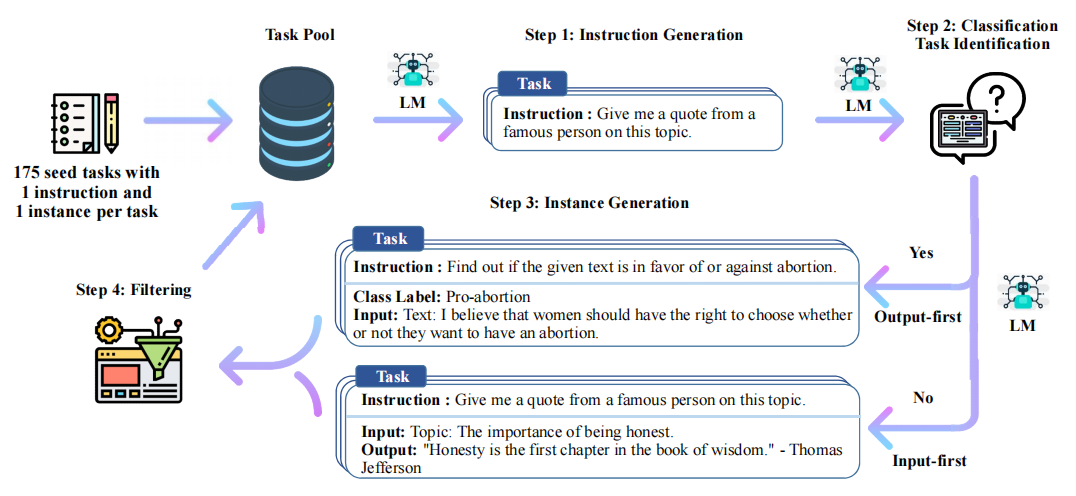
Stanford Alpaca 结合英文语料通过Self Instruct方式微调LLaMA 7B Stanford Alpaca简介 2023年3月中旬,斯坦福的Rohan Taori等人发布Alpaca(中文名:羊驼):号称只花100美元,人人都可微调Meta家70亿参数的LLaMA大模型(即LLaMA 7B), 具体做法是通过52k指令数据,然后在8个80GB A100上训练3个小时,使得Alpaca版的LLaMA 7B在单纯对话上的性能比肩GPT-3.5(text-davinci-003) ,这便是指令调优LLaMA的意义所在 论文《Alpaca: A Strong Open-Source Instruction-Following Model》 GitHub地址: https://github.com/tatsu-lab/stanford_alpaca 数据地址 (即斯坦福团队微调LLaMA 7B所用的52K英文指令数据): raw.githubusercontent.com/tatsu-lab/stanford_alpaca/main/alpaca_data.json...
Large Model
2026-04-15
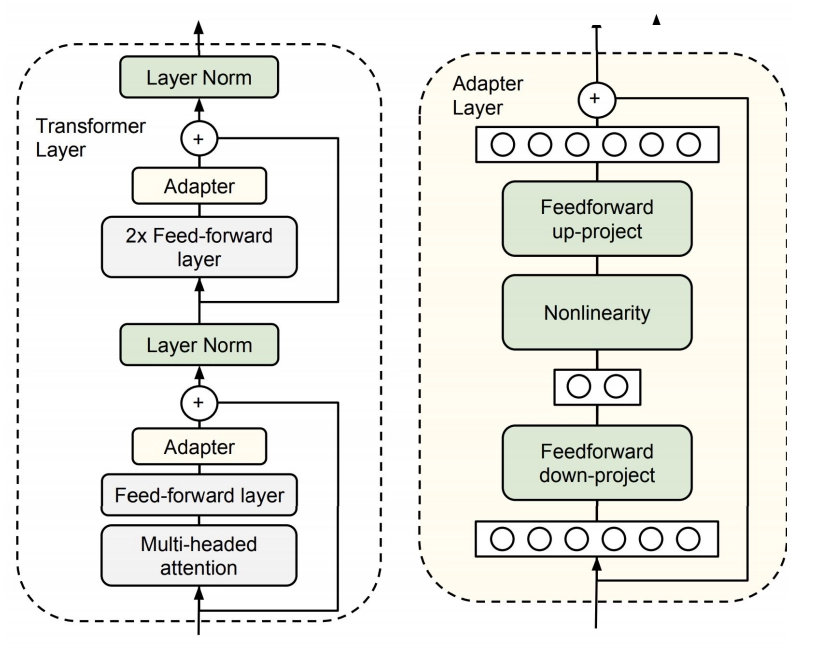
Adapter tuning Adapter Tuning试图在Transformer Layer的Self-Attetion+FFN之后插入一个先降维再升维的MLP(以及一层残差和LayerNormalization)来学习模型微调的知识。 在预训练模型每一层(或某些层)中添加Adapter模块(如上图左侧结构所示),微调时冻结预训练模型主体,由Adapter模块学习特定下游任务的知识。每个Adapter模块由两个前馈子层组成,第一个前馈子层将Transformer块的输出作为输入,将原始输入维度 \(d\) 投影到 \(m\) ,通过控制 \(m\) 的大小来限制Adapter模块的参数量,通常情况下 \(m\ll d\) 。在输出阶段,通过第二个前馈子层还原输入维度,将 \(m\) 重新投影到 \(d\)...
Large Model
2026-04-15
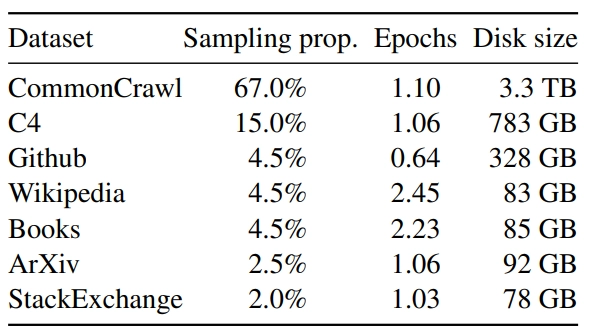
LLaMA 论文名称 :LLaMA: Open and Efficient Foundation Language Models 论文地址: https://arxiv.org/pdf/2302.13971.pdf 代码链接: https://github.com/facebookresearch/llama 模型参数量级的积累,或者训练数据的增加,哪个对性能提升帮助更大? 以 GPT-3 为代表的大语言模型 (Large language models, LLMs) 在海量文本集合上训练,展示出了惊人的涌现能力以及零样本迁移和少样本学习能力。GPT-3 把模型的量级缩放到了 175B,也使得后面的研究工作继续去放大语言模型的量级。大家好像有一个共识,就是: 模型参数量级的增加就会带来同样的性能提升。 但是事实确实如此吗? 最近的 "Training Compute-Optimal Large Language Models" 这篇论文提出一种 缩放定律 (Scaling Law): 训练大语言模型时,在计算成本达到最优情况下,模型大小和训练数据 (token)...
Generative Model
2026-04-15

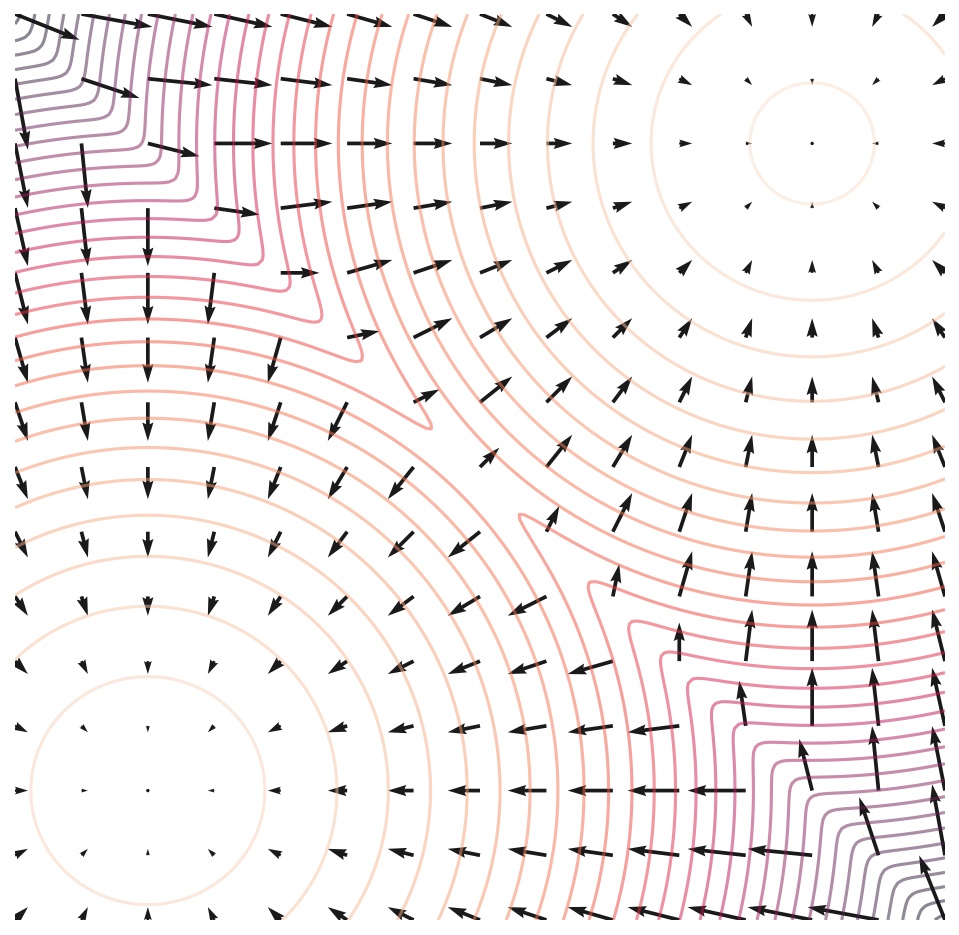
Diffusion Models from SDE 连续扩散模型 (Continuous Diffusion Models) 将传统的离散时间扩散过程扩展到连续时间域,可以被视为一个随机过程,使用随机微分方程(SDE)来描述。其前向过程可以写成如下形式: \[\mathrm d\mathbf x=\mathbf f(\mathbf x,t)\mathrm dt+g(t)\mathrm d\mathbf w\tag{1}\] 其中, \(f(x,t)\) 可以看成偏移系数, \(g(t)\) 可以看成是扩散系数, \(dw\) 是标准布朗运动。这个SDE 描述了数据在连续时间域内如何被噪声逐渐破坏。 这个随机过程的 逆向过程 存在(更准确的描述:下面的逆向时间SDE具有 与正向过程SDE相同的联合分布 )为 \[d\mathbf{x}=[\mathbf{f}(\mathbf{x},t)-g^2(t)\nabla_{\mathbf{x}}\log p_t(\mathbf{x})]dt+g(t)d\bar{\mathbf{w}}\tag{2}\]...
Generative Model
2026-04-15

- SMLD 和 DDPM 中使用的噪声扰动可以看作是两个不同 SDE 的离散化 - 扩散模型和评分模型在连续时间极限下完全等价,也就是说将有限次数的加噪过程推广到无穷次, 也就是推广到连续的情况下,可以得到一个更加一般的扩散过程,这个过程可以用SDE来表示,求解更加方便 - 两种方法的目标函数可以互相转换 随机微分 在DDPM中,扩散过程被划分为了固定的T步,还是用DDPM中的类比来说,就是“拆楼”和“建楼”都被事先划分为了T步,这个划分有着相当大的人为性。事实上,真实的“拆”、“建”过程应该是没有刻意划分的步骤的,我们可以将它们理解为一个在时间上连续的变换过程,可以用随机微分方程(Stochastic Differential Equation,SDE)来描述。 为此,我们用下述SDE描述前向过程(“拆楼”): \[d\boldsymbol{x} = \boldsymbol{f}_t(\boldsymbol{x}) dt + g_t d\boldsymbol{w}\tag{1}\]...
背景 RLHF 通常包括三个阶段: 有监督微调(SFT) RLHF首先通过在高质量数据上进行监督学习来微调预训练的语言模型,得到模型 \(\pi_{SFT}\) 。 奖励建模阶段 (Reward Model) 在第二阶段,SFT模型根据提示 \(x\) 生成答案对 \((y_1, y_2) \sim \pi_{SFT}(y|x)\) 。这些答案对呈现给人类标注者,他们表达对一个答案的偏好,表示为 \(y_w \succ y_l|x\) ,其中 \(y_w\) 和 \(y_l\) 分别表示在 \((y_1, y_2)\) 中更受偏好和不受偏好的答案。 这些偏好被假定由某个潜在的奖励模型 \(r^*(y, x)\) 生成,我们无法直接访问该模型。一种流行的建模偏好的方法是Bradley-Terry(BT)模型,该模型规定人类偏好分布 \(p^*\) 可以写为: \[p^*(y_1 \succ y_2|x) = \frac{\exp(r^*(x, y_1))}{\exp(r^*(x, y_1)) + \exp(r^*(x, y_2))}
\] 假设我们有一个从 \(p^*\)...
Large Model
2026-04-15

简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...
Large Model
2026-04-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
Computer Vision
2026-04-15

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算