
💡 GRPO相比PPO主要优势: 1. 训练更稳定 引入 KL 散度惩罚项,有效控制策略更新的幅度,避免策略崩溃,提高训练的稳定性 GRPO用组内相对优势替代value model,消除了value估计误差 通过组内归一化,自动消除reward scale和bias的影响 实验中发现GRPO的advantage方差比PPO小30%左右,训练崩溃率更低 2. 工程更简单 只需要1-2个模型(policy + reference),而PPO需要4个 显存占用减少50%以上,训练速度提升2-3倍 超参数更少,更容易调优 3. 相对奖励机制 通过对同一输入生成的多个输出进行比较,GRPO 能够更稳定地估计优势函数,减少了训练过程中的方差 背景 GRPO是 DeepSeek-Math model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO Vs GRPO PPO回顾 PPO的目标函数为: \[\begin{aligned}J_{PPO}(\theta) =...
NLP
2026-04-15
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
NLP
2026-04-15

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
Large Model
2026-04-15
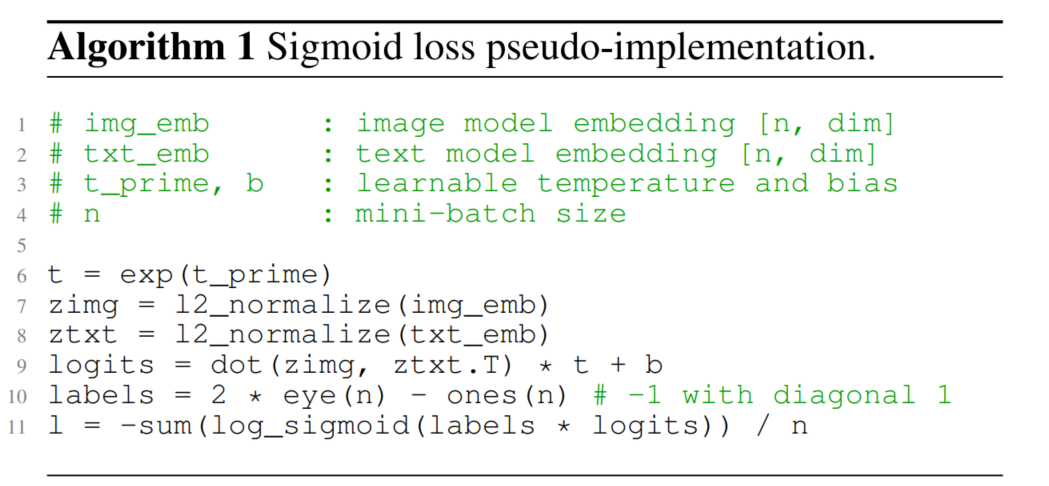
SigLIP 概述 CLIP自提出以来在zero-shot分类、跨模态搜索、多模态对齐等多个领域得到广泛应用。得益于其令人惊叹的能力,激起了研究者广泛的关注和优化。 目前对CLIP的优化主要可以分为两大类: 其一是如何降低CLIP的训练成本; 其二是如何提升CLIP的performance。 对于第一类优化任务的常见思路有3种。 优化训练架构,如 LiT 通过freezen image encoder,单独训练text encoder来进行text 和image的对齐来加速训练; 减少训练token,如 FLIP 通过引入视觉mask,通过只计算非mask区域的视觉表征来实现加速(MAE中的思路) 优化目标函数,如 CatLIP 将caption转为class label,用分类任务来代替对比学习任务来实现加速。 对于第二类提升CLIP的performance最常用和有效的手段就是数据治理,即构建高质量、大规模、高多样性的图文数据,典型的工作如:DFN。 SigLIP这篇paper 提出用sigmoid...
Reinforcement Learning
2026-04-15
回顾 PPO \[\begin{equation}\begin{aligned}\mathcal{J}_{\text{PPO}}(\theta) &= \mathbb{E}_{(q,a)\sim\mathcal{D}, o_{<t}\sim\pi_{\theta_{\text{old}}}(\cdot|q)} \\
&\left[ \min \left( \frac{\pi_\theta(o_t \mid q, o_{<t})}{\pi_{\theta_{\text{old}}}(o_t \mid q, o_{<t})} \hat{A}_t, \text{clip}\left(\frac{\pi_\theta(o_t \mid q, o_{<t})}{\pi_{\theta_{\text{old}}}(o_t \mid q, o_{<t})}, 1-\varepsilon, 1+\varepsilon\right) \hat{A}_t \right) \right]\end{aligned}\tag{1}\end{equation}\] 其中 \((q, a)\) 是 数据集...