
236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
NLP
2026-04-15

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了 Transformer 。Transformer 是Google Brain 2017的提出的一篇工作,它针对RNN的弱点进行重新设计,解决了RNN效率问题和传递中的缺陷等,在很多问题上都超过了RNN的表现。Transfromer的基本结构如下图所示,...
Large Model
2026-04-15
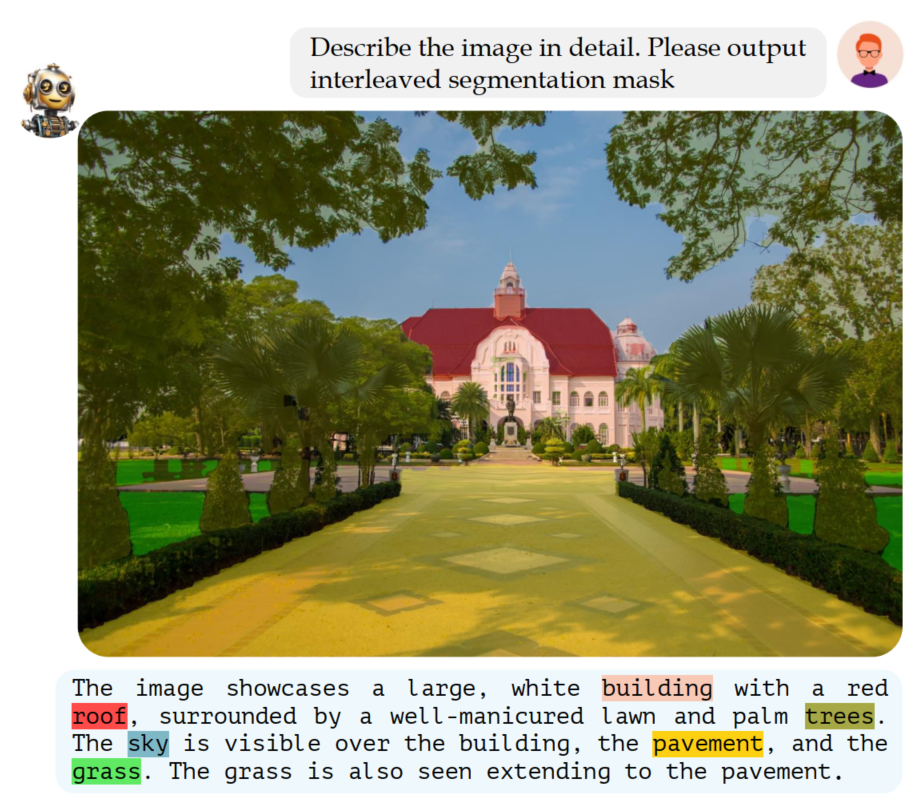
简介 该工作建立了一个 GCG(Grounded Conversation Generation ) 的数据集和对应多模态大模型,与之前的工作主要的区别在于针对输入图像,可以生成grounding pixel-level理解的语言对话,如下图示例所示: Model Automated Dataset Annotation Pipeline level 1: Object locatlization and attributes 1. Landmark Categorization 基于 LLaVA 模型对图像做场景的分类, 包含主要场景和细粒度场景。 就是对数据集整体做一个大的类别标签和子类别标签,做场景的划分 def get_main_prompt(model, conv_mode="llava_v1"):
options = ["Indoor scene", "Outdoor scene", "Transportation scene", "Sports and recreation scene"]
qs = (f"Categorize the image...
Generative Model
2026-04-15

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION-5B也是开源的。SD在开源90天github仓库就收获了 33K的stars ,可见这个模型是多受欢迎。 SD是一个 基于latent的扩散模型 ,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于 Latent Diffusion 这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 基于latent的扩散模型的优势在于计算效率更高效,因为图像的latent空间要比图像pixel空间要小,这也是SD的核心优势...
Generative Model
2026-04-15

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Large Model
2026-04-15

CLIP算法原理 CLIP 不预先定义图像和文本标签类别,直接利用从互联网爬取的 400 million 个image-text pair 进行图文匹配任务的训练,并将其成功迁移应用于30个现存的计算机视觉分类。简单的说,CLIP 无需利用 ImageNet 的数据和标签进行训练,就可以达到 ResNet50 在 ImageNet数据集上有监督训练的结果,所以叫做 Zero-shot。 CLIP(contrastive language-image pre-training)主要的贡献就是 利用无监督的文本信息,作为监督信号来学习视觉特征 。 CLIP 作者先是回顾了并总结了和上述相关的两条表征学习路线: 构建image和text的联系,比如利用已有的image-text pair数据集,从text中学习image的表征; 获取更多的数据(不要求高质量,也不要求full...
NLP
2026-04-15

Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times d}\) ,一般场景下都有 \(n > d\) 甚至...
Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\end{equation}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times...
NLP
2026-04-15

概述 本文模型脉络图 本文介绍一个比较有意思的高效Transformer工作——来自Google的 《Transformer Quality in Linear Time》 , 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论文一下子做到了两点,所以我愿意用“惊喜满满”来形容它。更重要的是,论文的改进总的来说还是比较自然和优雅的,不像很多类似工作一样显得很生硬。此外,笔者自己也做了简单的复现实验,结果显示论文的可复现性应该是蛮好的,所以真的有种“Transformer危矣”的感觉了。 门控注意(Gated Attention Unit)...
Large Model
2026-04-15
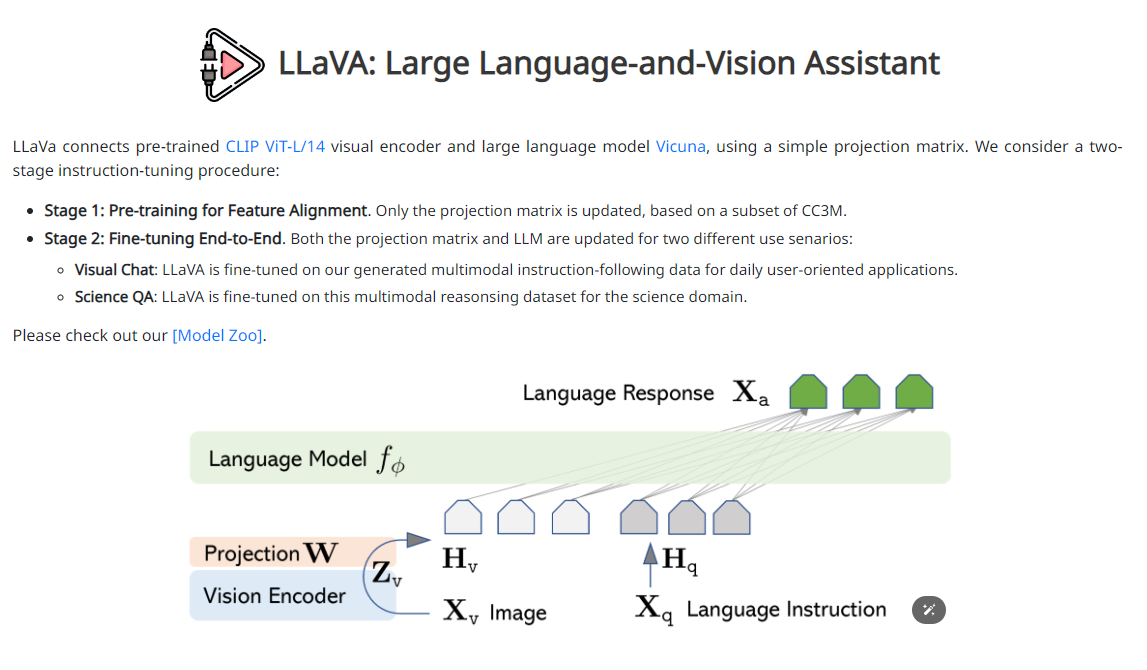
项目: https://llava-vl.github.io/ github: https://github.com/haotian-liu/LLaVA 一句话 优点 : 极大简化了VLM的训练方式:Pre-training + Instruction Tuning 训练量得到简化:1M量级数据+ 8卡A100 → 一天完成训练 LLaVA LLaVA是2023的连续工作,包含了LLaVA 1.0, 1.5, 1.6几个版本(后续会有更多),也是2023年多模态领域妥妥的顶流。发表9个月620的stars,GitHub超过12K的stars。 LLaVA它的网络结构简单、微调成本比较低,任何研究组、企业甚至个人都可以基于它构建自己的领域的多模态模型。 非常建议对多模态大模型感兴趣的朋友关注LLaVA这篇工作。 简介...