
概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
Generative Model
2026-04-15

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Computer Vision
2026-04-15

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算

论文地址: https://arxiv.org/pdf/2107.11291 代码地址: https://github.com/Jeff-sjtu/res-loglikelihood-regression 前言 一般来说, 我们可以把姿态估计任务分成两个流派:Heatmap-based和Regression-based。 其主要区别在于监督信息的不同,Heatmap-based方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或soft-argmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression-based方法则非常简单粗暴,直接监督模型学习坐标值,计算坐标值的L1或L2...
Computer Vision
2026-04-15

Segment Anything Segment Anything(SA)项目:一个用于图像分割的新任务、新模型和新数据集 通过FM(基础模型)+prompt解决了CV中难度较大的分割任务,给计算机视觉实现基础模型+提示学习+指令学习提供了一种思路 关键:加大模型容量(构造海量的训练数据,或者构造合适的自监督任务来预训练) Segment Anything Task SAM的一部分灵感是来源于NLP中的基座模型(Foundation Model),Foundation Model是OpenAI提出的一个概念,它指的是在超大量数据集上预训练过的大模型(如GPT系列、BERT),这些模型具有非常强大的 zero-shot 和 few-shot能力,结合prompt engineering和fine tuning等技术可以将基座模型应用在各种下游任务中并实现惊人的效果。 SAM就是想构建一个这样的图像分割基座模型,即使是一个未见过的数据集,模型也能自动或半自动(基于prompt)地完成下游的分割任务。为了实现这个目标,SAM定义了一种可提示化的分割任务(promptable...
Large Model
2026-04-15
引言 Structured Generation with LLM,是指 让LLM按照预先定义的schema,输出符合schema的结构化结果 。 常见的应用场景有: 数据处理 。主要功能为a -> b,即从源文本中 抽取/生成 符合schema的结果,例如给定新闻,进行分类、抽取关键词、生成总结等; Agent 。主要功能是Tool Calling,即根据用户query,选择适当的tool和入参。 将 LLM 限制为始终生成符合特定模式的、有效的 JSON 或 YAML,是许多应用的关键功能。 Kor Kor ,一个 基于prompt的技术方案 ;Kor比较适合 数据处理 场景,且原理简单、易于理解,适合作为入门, 并且Kor适用于那些不支持function calling的比较旧的模型。 使用Kor进行structured generation的流程如下: 定义schema,包括结构、注释还有例子; Kor用特定的 prompt template ,将用户提供的schema和待处理的raw text,组装成prompt; 将prompt发送给LLM,借助其通用的In...
Large Model
2026-04-15

引言与背景 FlashAttention的关键创新在于使用类似于在线Softmax的思想来对自注意力计算进行分块(tiling),从而能够融合整个多头注意力层的计算,而无需访问GPU全局内存来存储中间的logits和注意力分数 在深度学习中,Transformer模型的自注意力机制是计算密集型操作。传统实现需要在GPU全局内存中存储大量中间结果,这导致: 内存瓶颈 :中间矩阵占用大量显存 I/O开销 :频繁的全局内存访问降低效率 扩展性限制 :难以处理超长序列 FlashAttention通过算法创新解决了这些问题。 Self-Atention 自注意力机制的计算可以总结为(为简化说明,忽略头数和批次维度,也省略注意力掩码和缩放因子 \(\frac{1}{\sqrt{D}}\) ): \[O = \text{softmax}(QK^T)V\] 其中: \(Q, K, V, O\) 都是形状为 \((L, D)\) 的二维矩阵 \(L\) 是序列长度 \(D\) 是每个头的维度(头维度) softmax应用于最后一个维度(列) 标准计算流程, 传统方法将自注意力计算分解为几个阶段:...
Computer Vision
2026-04-15

概述 在计算机视觉领域(CV),对视觉特征的理解CNN是长期处于主导地位的。而在NLP领域,Transformer框架的巨大成功,也激发了不少研究者探索将Transformer用于计算机视觉任务。ViT(Vision Transformer)的出现标志着在CV领域Transformer架构迈出了重要的一步。尤其在当前结合LLM的多模态探索上(MM-LLM),都是以LLM大语言模型为骨干架构的模型,多种模态的信息需要先做token化处理,再输入到LLM模型。ViT天然具有序列化特征的建模能力,自然在MM-LLM探索中大放异彩~ ViT在多模态模型中的角色类似于自然语言建模中的Tokenizer组件,对图像进行视觉特征编码,产出图像的序列特征。只不过ViT的编码过程本身也是采用了Transformer的模型结构。 本文主要结合几篇paper和源码讲讲ViT和针对ViT的一些优化方法~ ViT(Vision Transformer)...
Large Model
2026-04-15
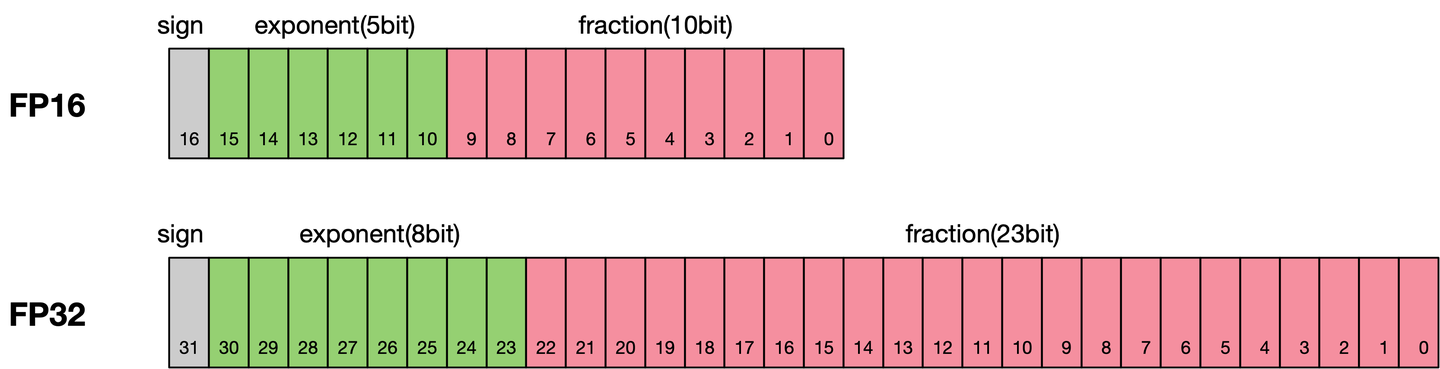
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。 这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16) 。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的位来表示。 FP64表示采用8个字节共64位,来进行的编码存储的一种数据类型; FP32表示采用4个字节共32位来表示; FP16则是采用2字节共16位来表示。 如图所示: 从图中可以看出,与FP32相比,FP16的存储空间是FP32的一半,FP32则是FP16的一半。主要分为三个部分:...
Large Model
2026-04-15
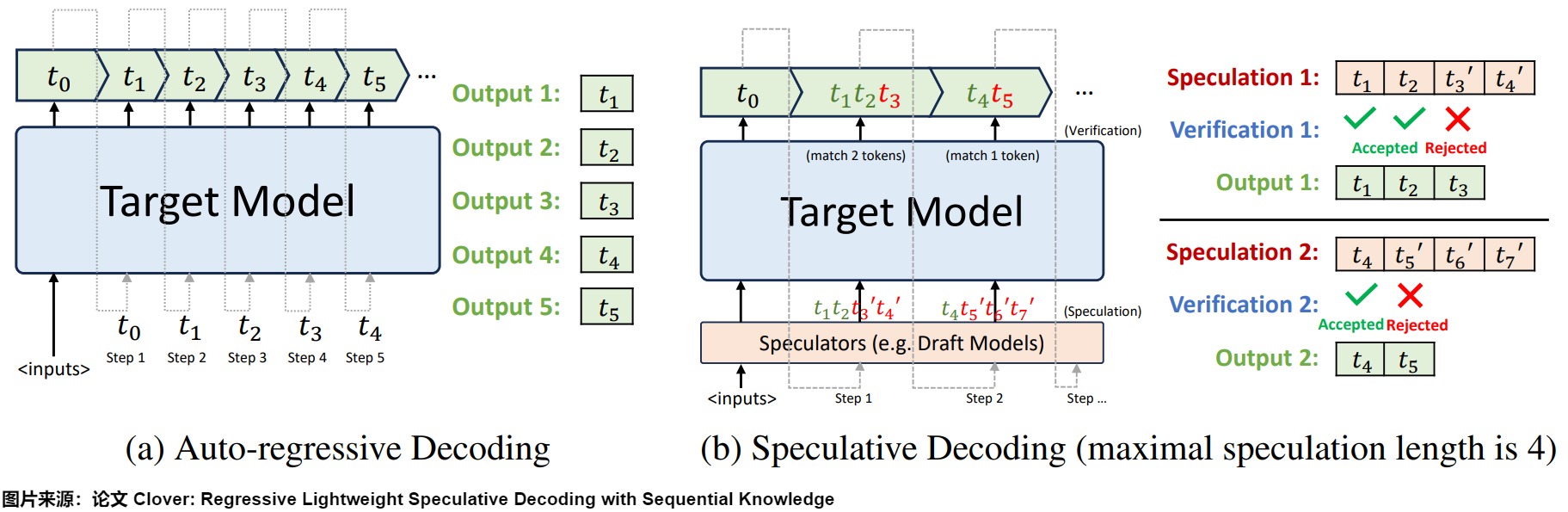
概述 投机解码(Speculative Decoding)也叫预测解码/投机采样,它会利用小模型来预测大型模型的行为,从而提升模型在解码(decoding)阶段的解码效率问题,加速大型模型的执行。其核心思路如下图所示,首先以低成本的方式(以小模型为主,也有多头,检索,Early Exit 等方式)快速生成多个候选 Token(串行序列、树、多头树等),然后通过一次并行验证阶段快速验证多个 Token的正确性,只要平均每个 Step 验证的 Token 数 > 1,就可以一次性生成多个token,进而减少总的 Decoding 步数,实现加速的目的。 下图左侧是自回归解码模型,右侧是投机解码机制。 从本质上来说,投机解码希望在推理阶段在不大幅度改变模型的情况下,通过更好利用冗余算力来并行"投机"地猜测出模型接下来要输出的token。作为对比,也有一种方案是通过路由的方式组合多个不同规模和性能的模型。路由方式在调用之前已经确定好需要调用哪个模型,直到调用结束。而投机解码在一个 Query 内会反复调用大小模型。 背景 我们都知道,生成式 LLM 大部分是 Decoder-only...
Large Model
2026-04-15

概述 https://github.com/FasterDecoding/Medusa Medusa 是自投机领域较早的一篇工作,对后续工作启发很大,其主要思想是 multi-decoding head + tree attention + typical acceptance(threshold)。Medusa 没有使用独立的草稿模型,而是在原始模型的基础上增加多个解码头(MEDUSA heads),并行预测多个后续 token。 正常的LLM只有一个用于预测 \(t\) 时刻token的head。Medusa 在 LLM 的最后一个 Transformer层之后保留原始的 LM Head,然后额外增加多个(假设是 \(k\) 个) 可训练的Medusa Head(解码头),分别负责预测 \(t+1,t+2,...,\) 和 \(t+k\) 时刻的不同位置的多个 Token。 Medusa 让每个头生成多个候选 token,而非像投机解码那样只生成一个候选。然后将所有的候选结果组装成多个候选序列,多个候选序列又构成一棵树。再通过树注意力机制并行验证这些候选序列 。 原理...