背景 RLHF 通常包括三个阶段: 有监督微调(SFT) RLHF首先通过在高质量数据上进行监督学习来微调预训练的语言模型,得到模型 \(\pi_{SFT}\) 。 奖励建模阶段 (Reward Model) 在第二阶段,SFT模型根据提示 \(x\) 生成答案对 \((y_1, y_2) \sim \pi_{SFT}(y|x)\) 。这些答案对呈现给人类标注者,他们表达对一个答案的偏好,表示为 \(y_w \succ y_l|x\) ,其中 \(y_w\) 和 \(y_l\) 分别表示在 \((y_1, y_2)\) 中更受偏好和不受偏好的答案。 这些偏好被假定由某个潜在的奖励模型 \(r^*(y, x)\) 生成,我们无法直接访问该模型。一种流行的建模偏好的方法是Bradley-Terry(BT)模型,该模型规定人类偏好分布 \(p^*\) 可以写为: \[p^*(y_1 \succ y_2|x) = \frac{\exp(r^*(x, y_1))}{\exp(r^*(x, y_1)) + \exp(r^*(x, y_2))}
\] 假设我们有一个从 \(p^*\)...
Large Model
2026-04-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
Computer Vision
2026-04-15

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算
Reinforcement Learning
2026-04-15

基础概念 Grid-Word Example 环境描述 :网格世界是一个直观的二维环境,包含: 白色格子 :可通行区域。 橙色格子 :禁止进入的区域(禁区)。 目标格子 :代理需要到达的目标位置。 任务目标 : 找到一条“好的”策略,使代理从任意初始位置到达目标格子。 策略应避免进入禁区、碰撞边界或走不必要的弯路。 什么是强化学习:依据策略执行动作-感知状态-得到奖励 所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。 a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment 经典的强化学习模型可以总结为下图的形式(你可以理解为任何强化学习都包含这几个基本部分:智能体、行为、环境、状态、奖励):...
NLP
2026-04-15

Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times d}\) ,一般场景下都有 \(n > d\) 甚至...
Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\end{equation}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times...
NLP
2026-04-15
Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\end{equation}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times...
NLP
2026-04-15

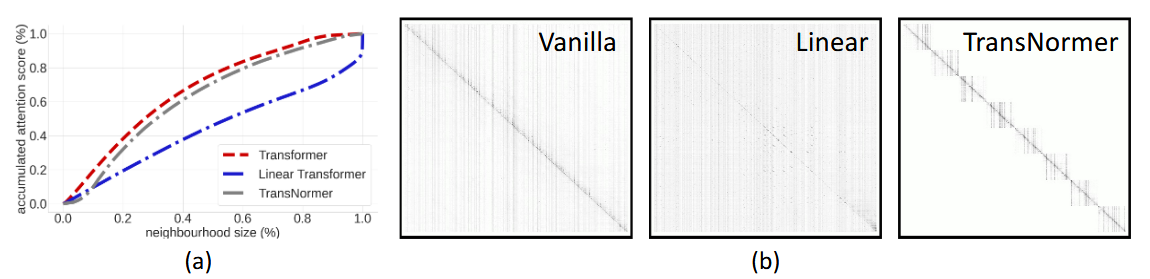
概述 本文模型脉络图 本文介绍一个比较有意思的高效Transformer工作——来自Google的 《Transformer Quality in Linear Time》 , 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论文一下子做到了两点,所以我愿意用“惊喜满满”来形容它。更重要的是,论文的改进总的来说还是比较自然和优雅的,不像很多类似工作一样显得很生硬。此外,笔者自己也做了简单的复现实验,结果显示论文的可复现性应该是蛮好的,所以真的有种“Transformer危矣”的感觉了。 门控注意(Gated Attention Unit)...
Large Model
2026-04-15

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...

论文地址: https://arxiv.org/pdf/2107.11291 代码地址: https://github.com/Jeff-sjtu/res-loglikelihood-regression 前言 一般来说, 我们可以把姿态估计任务分成两个流派:Heatmap-based和Regression-based。 其主要区别在于监督信息的不同,Heatmap-based方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或soft-argmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression-based方法则非常简单粗暴,直接监督模型学习坐标值,计算坐标值的L1或L2...
NLP
2026-04-15

概述 众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是 \(\mathcal{O}(n^2)\) 级别的, \(n\) 是序列长度,所以当 \(n\) 比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到 \(\mathcal{O}(n\log n)\) 甚至 \(\mathcal{O}(n)\) 。 改变这一复杂度的思路主要有两种: 一是走稀疏化的思路,比如OpenAI的 Sparse Attention ,通过“只保留小区域内的数值、强制让大部分注意力为零”的方式,来减少Attention的计算量。经过特殊设计之后,Attention矩阵的大部分元素都是0,因此理论上它也能节省显存占用量和计算量。后续类似工作还有 《Explicit Sparse Transformer: Concentrated Attention Through Explicit...
NLP
2026-04-15

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4 ,不算太老,而SSM最新最火的变体大概是 Mamba 。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样 RWKV 、 RetNet 还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作 《HiPPO: Recurrent Memory with Optimal Polynomial Projections》 (简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mamba的一作都是 Albert Gu ,他还有很多篇SSM相关的作品,毫不夸张地说,这些工作筑起了SSM大厦的基础。不论SSM前景如何,这种坚持不懈地钻研同一个课题的精神都值得我们由衷地敬佩。 今天,基本上你能叫出的任何语言模型都是 Transformer 模型。OpenAI 的...