Large Model
2026-04-15
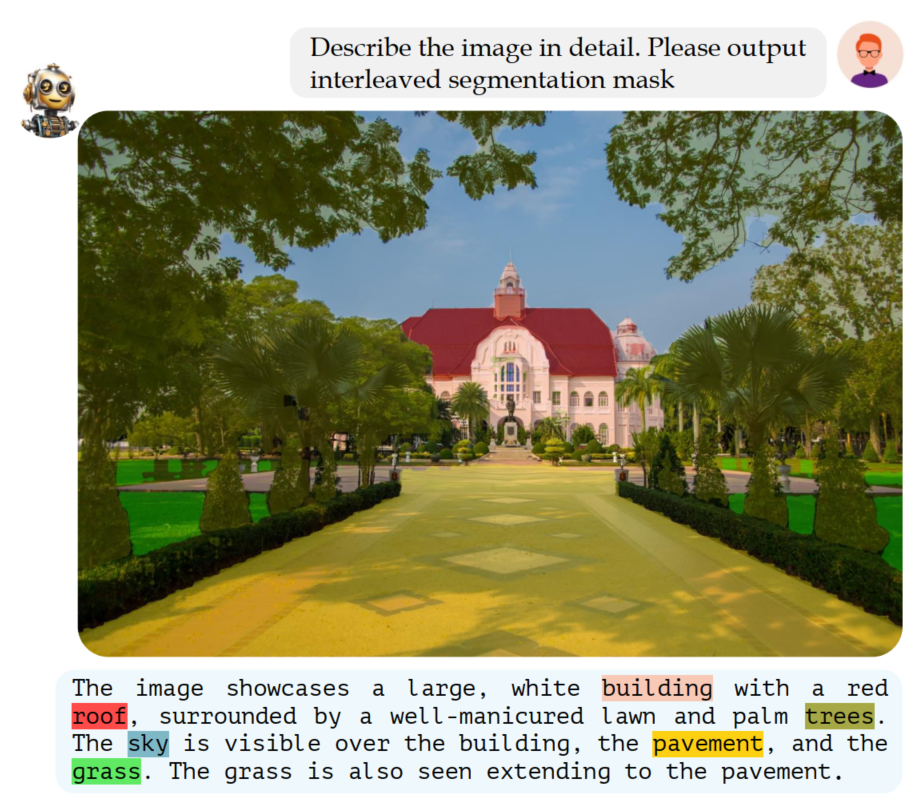
简介 该工作建立了一个 GCG(Grounded Conversation Generation ) 的数据集和对应多模态大模型,与之前的工作主要的区别在于针对输入图像,可以生成grounding pixel-level理解的语言对话,如下图示例所示: Model Automated Dataset Annotation Pipeline level 1: Object locatlization and attributes 1. Landmark Categorization 基于 LLaVA 模型对图像做场景的分类, 包含主要场景和细粒度场景。 就是对数据集整体做一个大的类别标签和子类别标签,做场景的划分 def get_main_prompt(model, conv_mode="llava_v1"):
options = ["Indoor scene", "Outdoor scene", "Transportation scene", "Sports and recreation scene"]
qs = (f"Categorize the image...