
💡 GRPO相比PPO主要优势: 1. 训练更稳定 引入 KL 散度惩罚项,有效控制策略更新的幅度,避免策略崩溃,提高训练的稳定性 GRPO用组内相对优势替代value model,消除了value估计误差 通过组内归一化,自动消除reward scale和bias的影响 实验中发现GRPO的advantage方差比PPO小30%左右,训练崩溃率更低 2. 工程更简单 只需要1-2个模型(policy + reference),而PPO需要4个 显存占用减少50%以上,训练速度提升2-3倍 超参数更少,更容易调优 3. 相对奖励机制 通过对同一输入生成的多个输出进行比较,GRPO 能够更稳定地估计优势函数,减少了训练过程中的方差 背景 GRPO是 DeepSeek-Math model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO Vs GRPO PPO回顾 PPO的目标函数为: \[\begin{aligned}J_{PPO}(\theta) =...
Large Model
2026-04-15
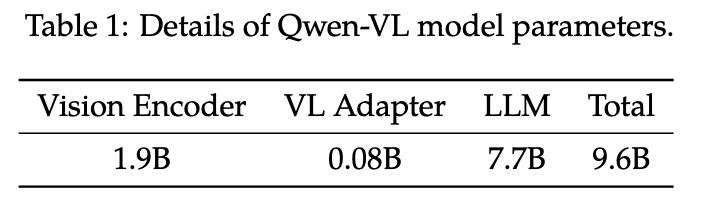
Qwen-VL 模型框架 Qwen-VL的整体网络架构由三个组件组成: LLM:使用 Qwen-7B 的预训练权重进行初始化。 视觉编码器:Qwen-VL 的可视化编码器使用ViT 架构,使用 Openclip 的 ViT-bigG 的预训练权重进行初始化。在训练和推理过程中,输入图像的大小都会调整为特定分辨率。视觉编码器通过以 14 步幅将图像分割成块来处理图像,生成一组图像特征。 位置感知视觉语言适配器:为了缓解长图像特征序列带来的效率问题,Qwen-VL 引入了一种视觉语言适配器来压缩图像特征。类似QFormer,该适配器包括一个随机初始化的单层交叉注意力模块。使用一组可训练向量(嵌入)作为query,并将视觉编码器中的图像特征作为交叉注意力作的key。该机制将视觉特征序列压缩到固定长度 256。 图像输入 图像不会直接以像素形式喂给语言模型(LLM)。 典型流程是: Visual Encoder :把图片编码成一串视觉特征(embedding/feature sequence)。 Adapter :把视觉特征映射到语言模型可接入的表征空间/维度。 最终得到:...
Large Model
2026-04-15
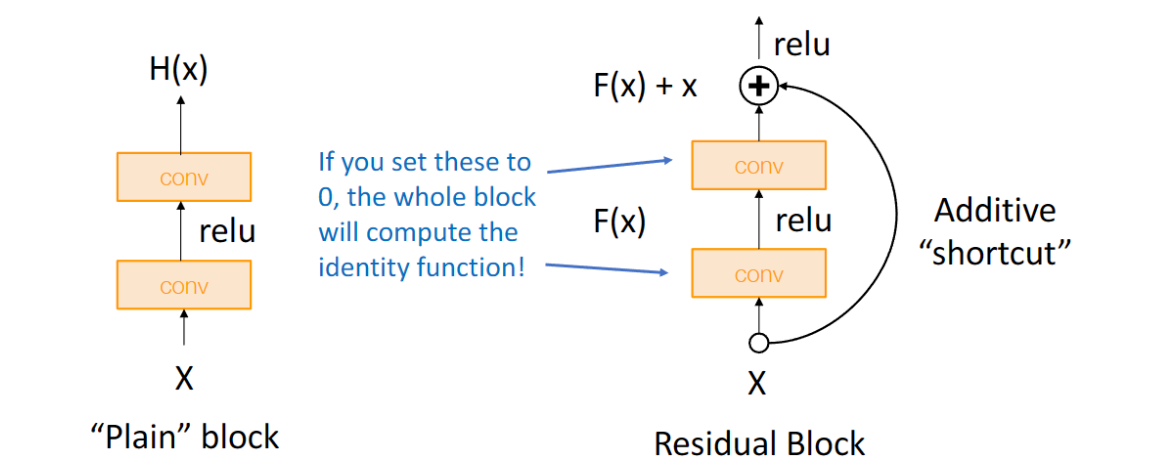
总览 由于是“图文多模态”,还是要从“图”和“文”的表征方法讲起,然后讲清楚图文表征的融合方法。这里只讲两件事情: 视觉表征 :分为两个部分问题,一是如何合理建模视觉输入特征,二是如何通过预训练手段进行充分学习表征,这两点是基于视觉完成具体算法任务的基础; 视觉与自然语言的对齐(Visul Language Alignment)或融合 :目的是将视觉和自然语言建模到同一表征空间并进行融合,实现自然语言和视觉语义的互通,这点同样离不开预训练这一过程。模态对齐是处理多模态问题的基础,也是现在流行的多模态大模型技术前提。 对于视觉表征,从发展上可以分为卷积神经网络(CNN)和Vision Transformer(VIT)两大脉络,二者分别都有各自的表征、预训练以及多模态对齐的发展过程。而对于VIT线,另有多模态大模型如火如荼的发展,可谓日新月异。 CNN:视觉理解的一代先驱 点击展开 卷积视觉表征模型和预训练...
Large Model
2026-04-15
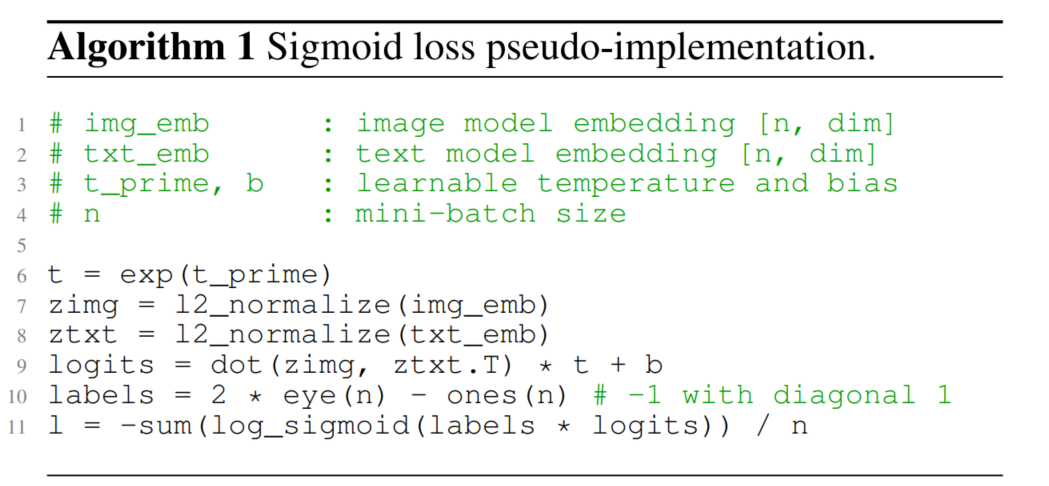
SigLIP 概述 CLIP自提出以来在zero-shot分类、跨模态搜索、多模态对齐等多个领域得到广泛应用。得益于其令人惊叹的能力,激起了研究者广泛的关注和优化。 目前对CLIP的优化主要可以分为两大类: 其一是如何降低CLIP的训练成本; 其二是如何提升CLIP的performance。 对于第一类优化任务的常见思路有3种。 优化训练架构,如 LiT 通过freezen image encoder,单独训练text encoder来进行text 和image的对齐来加速训练; 减少训练token,如 FLIP 通过引入视觉mask,通过只计算非mask区域的视觉表征来实现加速(MAE中的思路) 优化目标函数,如 CatLIP 将caption转为class label,用分类任务来代替对比学习任务来实现加速。 对于第二类提升CLIP的performance最常用和有效的手段就是数据治理,即构建高质量、大规模、高多样性的图文数据,典型的工作如:DFN。 SigLIP这篇paper 提出用sigmoid...
Deep Learning
2026-04-15
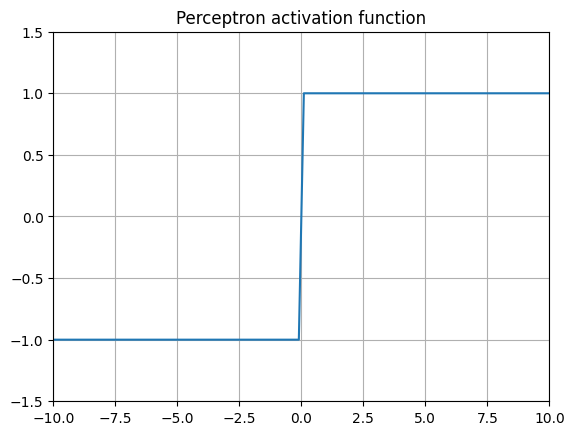
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或-1。 由于其二元特性,除了某一点外,其导数为 0。这意味着权重无法通过反向传播等技术与网络提供的标签成比例地缩放。 多层感知器会简化为线性函数,使得它难以处理非线性可分的数据,比如这两个甜甜圈点云。 Sigmoid \[sigmoid(x) = \frac{1}{1 + e^{-x}}\] logistic...