Batch Normalization
什么是批归一化(Batch Normalization)
以前在神经网络训练中,只是对输入层数据进行归一化处理,却没有在中间层进行归一化处理。要知道,虽然我们对输入数据进行了归一化处理,但是输入数据经过 \(\sigma(WX+b)\)这样的矩阵乘法以及非线性运算之后,其数据分布很可能被改变,而随着深度网络的多层运算之后,数据分布的变化将越来越大。如果我们能在网络的中间也进行归一化处理,是否对网络的训练起到改进作用呢?答案是肯定的。
这种在神经网络中间层也进行归一化处理,使训练效果更好的方法,就是批归一化Batch Normalization(BN)。
其作用在整个mini-batch上,沿着C维度对N,H,W三个维度进行归一化。具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 ...... 加上第 N 个样本第1个通道,求平均,得到通道 1 的均值(注意是除以 N×H×W 而不是单纯除以 N,最后得到的是一个代表这个 batch 第1个通道平均值的数字,而不是一个 H×W 的矩阵)。求通道 1 的方差也是同理。对所有通道都施加一遍这个操作,就得到了所有通道的均值和方差。
# coding;utf8
import torch
from torch import nn
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# s
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
bn = nn.BatchNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
x = torch.randn(10, 3, 5, 5)*10000 #x.shape:[10,3,5,5]
official_bn = bn(x)
# 把 channel 维度单独提出来,而把其它需要求均值和标准差的维度融合到一起
# x.permute(1, 0, 2, 3).shape: [c,n,h,w]
# x.permute(1, 0, 2, 3).contiguous(): [c,n,h,w]
# x.permute(1, 0, 2, 3).contiguous().view(3, -1): [c, n x h x w]
# x1 = x.permute(1, 0, 2, 3).contiguous().view(3, -1)
x1 = x.transpose(0,1).contiguous().view(3,-1)
# x1.mean(dim=1).shape: [3]
mu = x1.mean(dim=1).view(1, 3, 1, 1)
# unbiased=False, 求方差时不做无偏估计(除以 N-1 而不是 N),和原始论文一致 unbiased = False
# x1.std(dim=1).shape: [3]
std = x1.std(dim=1, unbiased=False).view(1, 3, 1, 1)
my_bn = (x - mu)/std
diff = (official_bn - my_bn).sum()
print(my_bn)
print('diff={}'.format(diff))
如何理解 Internal Covariate Shift?
深度神经网络模型的训练为什么会很困难?其中一个重要的原因是,深度神经网络涉及到很多层的叠加,而每一层的参数更新会导致上层的输入数据分布发生变化,通过层层叠加,高层的输入分布变化会非常剧烈,这就使得高层需要不断去重新适应底层的参数更新。为了训好模型,我们需要非常谨慎地去设定学习率、初始化权重、以及尽可能细致的参数更新策略。
Google 将这一现象总结为 Internal Covariate Shift,简称 ICS。 什么是 ICS 呢?
大家都知道在统计机器学习中的一个经典假设是“源空间(source domain)和目标空间(target domain)的数据分布(distribution)是一致的”。如果不一致,那么就出现了新的机器学习问题,如 transfer learning / domain adaptation 等。而 covariate shift 就是分布不一致假设之下的一个分支问题,它是指源空间和目标空间的条件概率是一致的,但是其边缘概率不同。
大家细想便会发现,的确,对于神经网络的各层输出,由于它们经过了层内操作作用,其分布显然与各层对应的输入信号分布不同,而且差异会随着网络深度增大而增大,可是它们所能“指示”的样本标记(label)仍然是不变的,这便符合了covariate shift的定义。由于是对层间信号的分析,也即是“internal”的来由。
那么ICS会导致什么问题?
简而言之,每个神经元的输入数据不再是“独立同分布”。
其一,上层参数需要不断适应新的输入数据分布,降低学习速度。
其二,下层输入的变化可能趋向于变大或者变小,导致上层落入饱和区,使得学习过早停止。
其三,每层的更新都会影响到其它层,因此每层的参数更新策略需要尽可能的谨慎。
批归一化(BN)算法的优点
下面我们来说一下BN算法的优点:
- 减少了人为选择参数。在某些情况下可以取消 dropout 和 L2 正则项参数,或者采取更小的 L2 正则项约束参数;
- 减少了对学习率的要求。现在我们可以使用初始很大的学习率或者选择了较小的学习率,算法也能够快速训练收敛;
- 可以不再使用局部响应归一化。BN 本身就是归一化网络(局部响应归一化在 AlexNet 网络中存在)
- 破坏原来的数据分布,一定程度上缓解过拟合(防止每批训练中某一个样本经常被挑选到,文献说这个可以提高 1% 的精度)。
- 减少梯度消失,加快收敛速度,提高训练精度。
批归一化(BN)算法流程
下面给出 BN 算法在训练时的过程
输入:上一层输出结果\(X = {x_1, x_2, ..., x_m}\) ,学习参数$ \gamma, \beta $
算法流程:
- 计算上一层输出数据的均值 $ \mu_{\beta} = \frac{1}{m} \sum_{i=1}^m(x_i)$,其中, \(m\) 是此次训练样本 batch 的大小。
- 计算上一层输出数据的标准差$ \sigma_{\beta}^2 = \frac{1}{m} \sum_{i=1}^m (x_i - \mu_{\beta})^2 $
- 归一化处理, 得到$ \hat x_i = \frac{x_i + \mu_{\beta}}{\sqrt{\sigma_{\beta}^2} + \epsilon} $,其中 $ \epsilon $ 是为了避免分母为 0 而加进去的接近于 0 的很小值
- 重构,对经过上面归一化处理得到的数据进行重构,得到$ y_i = \gamma \hat x_i + \beta \(:,其中\) \gamma, \beta $, 为可学习参数。
- 注:上述是 BN 训练时的过程,但是当在测试时,往往只是输入一个样本,没有所谓的均值 $ \mu_{\beta} $和标准差 $ \sigma_{\beta}^2 $。此时,均值 $ \mu_{\beta} $ 是计算所有 batch $ \mu_{\beta} $值的平均值得到,标准差 $ \sigma_{\beta}^2 $采用每个batch $ \sigma_{\beta}^2 $的无偏估计得到。
Batch Normalization在什么时候用比较合适?
在CNN中,BN应作用在非线性映射前。在神经网络训练时遇到收敛速度很慢,或梯度爆炸等无法训练的状况时可以尝试BN来解决。另外,在一般使用情况下也可以加入BN来加快训练速度,提高模型精度。
BN比较适用的场景是:每个mini-batch比较大,数据分布比较接近。在进行训练之前,要做好充分的shuffle,否则效果会差很多。另外,由于BN需要在运行过程中统计每个mini-batch的一阶统计量和二阶统计量,因此不适用于动态的网络结构和RNN网络。
Layer Normalization
Batch Normalization 的一个缺点是需要较大的 batchsize 才能合理估训练数据的均值和方差(横向计算),这导致内存很可能不够用,同时它也很难应用在训练数据长度不同的 RNN 模型上。Layer Normalization (LN) 的一个优势是不需要批训练,在单条数据内部就能归一化。
LN不再对mini-batch中的所有特征计算均值和方差,而是沿着batch维度对CHW三个维度进行归一化操作,从而克服了BN操作对于batch size大小比较敏感的缺点,非常适用于RNN网络的加速训练。
# coding;utf8
import torch
from torch import nn
x = torch.randn(10, 3, 5, 5)*10000 #x.shape:[10,3,5,5]
# normalization_shape 相当于告诉程序这本书有多少页,每页多少行多少列
# eps=0 排除干扰
# elementwise_affine=False 不作映射
# 这里的映射和 BN 以及下文的 IN 有区别,它是 elementwise 的 affine,
# 即 gamma 和 beta 不是 channel 维的向量,而是维度等于 normalized_shape 的矩阵
ln = nn.LayerNorm(normalized_shape=[3,5,5], eps=0, elementwise_affine = False)
official_ln = ln(x)
# 把 channel 维度单独提出来,而把其它需要求均值和标准差的维度融合到一起
x1 = x.contiguous().view(10, -1)
# x1.mean(dim=1).shape: [10]
mu = x1.mean(dim=1).view(10, 1, 1, 1)
# unbiased=False, 求方差时不做无偏估计(除以 N-1 而不是 N),和原始论文一致 unbiased = False
# x1.std(dim=1).shape: [3]
std = x1.std(dim=1, unbiased=False).view(10, 1, 1, 1)
my_ln = (x - mu)/std
diff = (official_ln - my_ln).sum()
print(my_ln)
print('diff={}'.format(diff))
Instance Normalization
Instance Normalization (IN) 最初用于图像的风格迁移。作者发现,在生成模型中, feature map 的各个 channel 的均值和方差会影响到最终生成图像的风格,因此可以先把图像在 channel 层面归一化,然后再用目标风格图片对应 channel 的均值和标准差“去归一化”,以期获得目标图片的风格。
IN 操作也在单个样本内部进行,不依赖 batch。
对于\(x\in \mathcal{R}^{N\times C\times H\times W}\),IN 对每个样本的 H、W 维度的数据求均值和标准差,保留 N 、C 维度,也就是说,它只在 channel 内部求均值和标准差.
import torch
from torch import nn
x = torch.rand(10, 3, 5, 5) * 10000
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# 而不是更新全局平均值和标准差
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
In = nn.InstanceNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
offcial_in = In(x)
x1 = x.view(30, -1)
mu = x1.mean(dim=1).view(10, 3, 1, 1)
std = x1.std(dim=1, unbiased=False).view(10, 3, 1, 1)
my_in = (x - mu)/std
diff = (my_in - offcial_in).sum()
print('diff={}'.format(diff))
Group Normalization
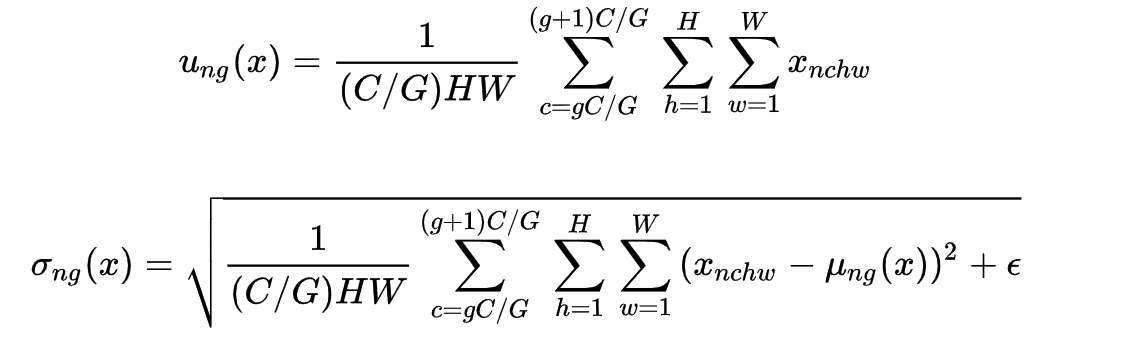
Group Normalization (GN) 适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batchsize 只能是个位数,再大显存就不够用了。而当 batchsize 是个位数时,BN 的表现很差,因为没办法通过几个样本的数据量,来近似总体的均值和标准差。GN 也是独立于 batch 的,它是 LN 和 IN 的折中。GN 计算均值和标准差时,把每一个样本 feature map 的 channel 分成 G 组,每组将有 C/G 个 channel,然后将这些 channel 中的元素求均值和标准差。各组 channel 用其对应的归一化参数独立地归一化。
import torch
from torch import nn
x = torch.rand(10, 20, 5, 5)*10000
# 分成 4 个 group
gn = nn.GroupNorm(num_groups=4, num_channels=20, eps=0, affine=False)
official_gn = gn(x)
#把同一个group的元素融合到一起
# 分成 4 个 group
x1 = x.view(10, 4, -1)
mu = x1.mean(dim=-1).reshape(10, 4, -1)
std = x1.std(dim=-1).reshape(10, 4, -1)
x1_norm = (x1 - mu)/std
my_gn = x1_norm.reshape(10, 20, 5, 5)
diff = (my_gn - official_gn).sum()
print('diff={}'.format(diff))
RMSNorm
文章指出,尽管 LayerNorm 带来了训练稳定性和速度的提升,但它也引入了额外的计算开销:
- 计算开销问题:
- 效率权衡:
Layer Normalization计算效率低
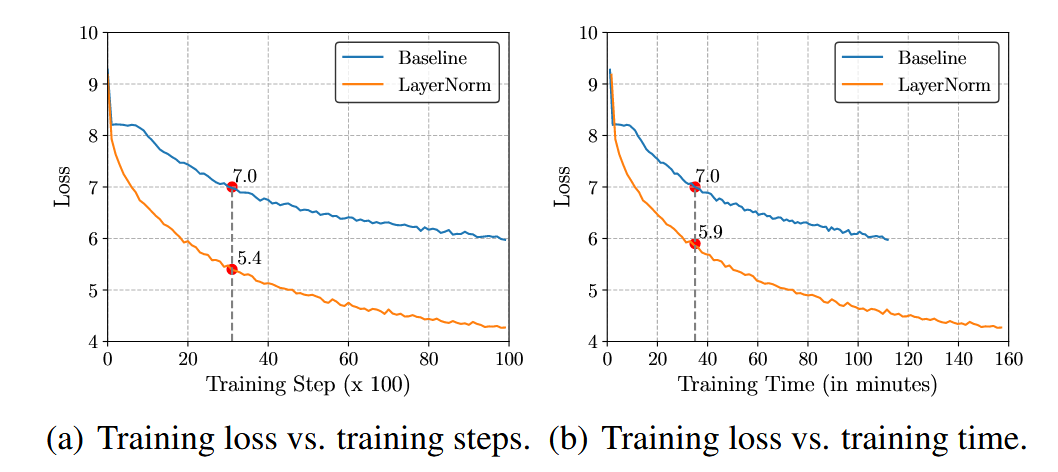
RMSNorm主要面向Layer Norm改进,归一化可以实现张量的聚集(re-centering)和缩放(re-scaling),在RNN等变长序列处理上,L-N的计算与批次解耦,使模型能够更多的学习序列转化关系,B-N则会受到不同输入的影响,模型无法专注于序列转化。但L-N在计算成本和耗时上比较昂贵,如图1中,当基准模型的损失为7.0时,花费相同的步数和相同时间的L-N模型的损失是有差异的,相同时间(b)的损失为5.9,高于相同步数(a)的损失5.4。
RMSNorm
L-N可以通过均值 \(μ\) 上的计算实现去中心,通过方差 \(σ\) 上的计算实现缩放,依托于中心化,模型在输入和权重上出现噪声时依旧具有不变的分布(99个0和1个100,中心化后不会改变99个较小值与1个较大值的分布),但文中指出L-N对张量所做的聚集中心化(re-centering)并不能够使梯度的方差减小,L-N的成功跟其关系并不大。
L-N计算
L-N均值方差参数
RMSNorm舍弃了中心化操作,归一化过程只实现缩放,缩放系数是均方根(RMS),L-N的均值 \(μ\) 为0时便是RMSNorm,RMS所做的只是缩放,不会改变数据原本的分布,有利于激活函数输出的稳定(缩放不改变向量方向):
恒定&梯度(Invariance&Gradient Analysis)
不变性:
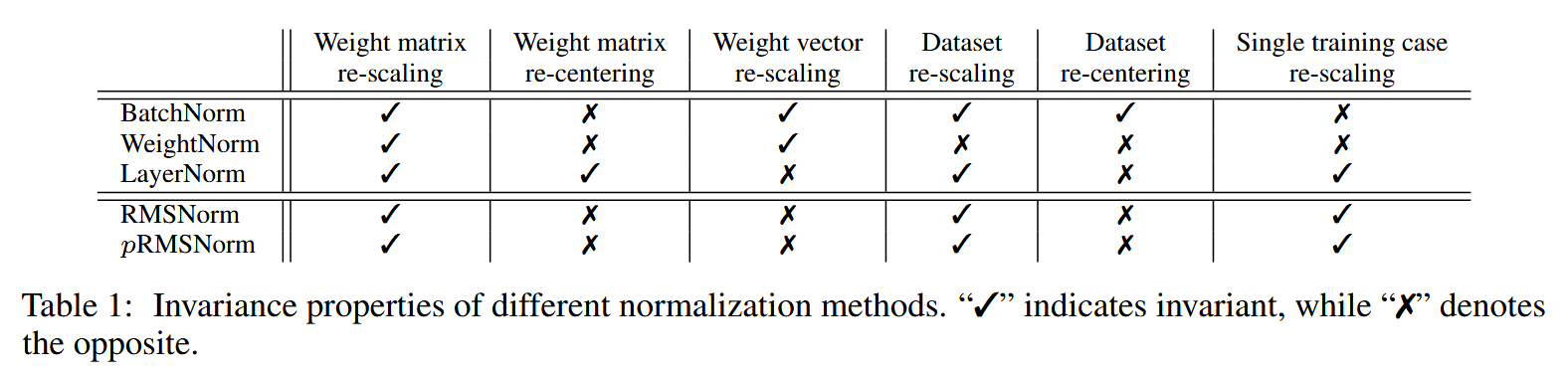
考虑输入和权重变化时,不同标准化因为采用方式不同,在不变性上的表现也有差异:
考虑以下RMSNorm一般形式:
其中,\(x\) 是输入向量, \(W\) 是权重矩阵:
RMSNorm 对权重矩阵和输入重新缩放都是不变的,因为 RMS 具有以下线性特性:
其中, \(\alpha\)是缩放因子, 假设权重矩阵按 \(δ\) 因子缩放( $W^′=δW $),输出不会受到影响:
梯度:
现有大多数神经网络的学习过程,都依赖基于梯度的方向传播来实现参数更新,因此梯度求解的鲁棒性是模型参数更新及收敛的重要依靠,从这一视角看归一化方法的成功不仅仅是增强了输入的稳定性,还来源于增加了优化空间的平滑度。
给定损失函数\(\mathcal{L}\),对于 \(\mathbf{b}\) 和 \(\mathbf{g}\) 的梯度有
其中 \(\mathbf{v}\) 代表 RMSNomr 中的 \(f(⋅)\) ,
\(\mathbf{g}\) 的梯度与RMS求和成比例,而不是直接与输入成比例,起到了平滑作用。对于权重 \(\mathbf{W}\) :
缩放 \(δ\) 作用在 \(\mathbf{R}\) :
由 \({\mathbf{R}}^{\prime } = \frac{1}{\delta }\mathbf{R}.\) ,权重矩阵的梯度与权重矩阵缩放程度负相关,从而减少梯度更新对于缩放程度的灵敏性,保证更新的平滑性和稳定性。
pRMSNorm
RMS具有线性特征,所以提出可以用部分数据的RMSNorm来代替全部的计算,pRMSNorm表示使用前p%的数据计算RMS值。\(k=n*p\) 表示用于RMS计算的元素个数。实测中,使用6.25%的数据量可以收敛
class RMSNorm(torch.nn.Module):
def __init__(
self,
dim: int,
eps: float = 1e-6,
add_unit_offset: bool = True,
):
super().__init__()
self.eps = eps
self.add_unit_offset = add_unit_offset
self.weight = nn.Parameter(torch.zeros(dim))
def _norm(self, x):
return x * torch.rsqrt(x.pow(2).mean(-1, keepdim=True) + self.eps)
def forward(self, x):
x = self._norm(x.float()).type_as(x)
if self.add_unit_offset:
output = x * (1 + self.weight)
else:
output = x * self.weight
return output