引言与背景
价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。
在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。
价值表示:从表格到函数
表格与函数表示的对比
传统的表格方法将状态值存储在一个表格中:
而函数近似方法则使用参数化函数来表示这些值,例如:
其中 称作是状态 的特征向量, 是参数向量。
两种不同的表现形式的区别主要体现在以下几个方面:
- 值的检索方式
- 值的更新方式
函数复杂度与近似能力
函数的复杂度决定了其近似的能力:
- 一阶线性函数:
- 二阶多项式:
随着函数阶数增加,近似精度提高,但参数向量维度也增加,需要更多存储和计算资源。
值得注意的是,上面两个例子中的 对于 来说是线性的(尽管对于 可能是非线性的)。这种类型的方法称为线性函数逼近(linear function approximation),这是最简单的函数逼近方法。
那么还有一个问题是如何求解最优参数向量呢,当我们已知真实状态值 ,寻找最优参数向量 就转化为一个标准的最小二乘问题。我们需要优化以下目标函数:
这个目标函数衡量的是函数近似值与真实值之间的平方误差总和。我们希望找到一个参数向量 ,使得这个误差最小化。
上述目标函数可以用矩阵形式更简洁地表示:
其中:
- 是特征矩阵,每一行是一个状态的特征向量
- 是真实状态值向量
- 是特征向量的维度(在例子中是2)
这个最小二乘问题的最优解有一个闭式解:
在实际的强化学习算法中,我们通常无法直接计算这个闭式解,因为我们不知道真实值 。相反,我们使用时序差分学习等方法来迭代地近似这个解,这将在后续中详细介绍。
基于函数近似的时序差分(TD)
目标函数
基于函数近似的TD learning旨在最小化以下目标函数:
其中期望是相对于随机变量 计算的。
这个目标函数可以基于不同的状态分布来定义:
- 均匀分布:
- 稳态分布:
🧾 **马尔可夫决策过程的稳态分布**
优化算法
为了最小化(1)式中的目标函数 ,可以使用梯度下降算法:
使用随机梯度下降,得到:
由于真实值 未知,可以使用以下替代:
- 蒙特卡洛方法:使用回报 作为 的近似
- 时序差分方法:使用 ,即 TD target 作为 的近似
因此,TD学习更新规则为:
在线性情况下(),此时更新规则简化为:
函数近似下的TD learning 算法伪代码如下:
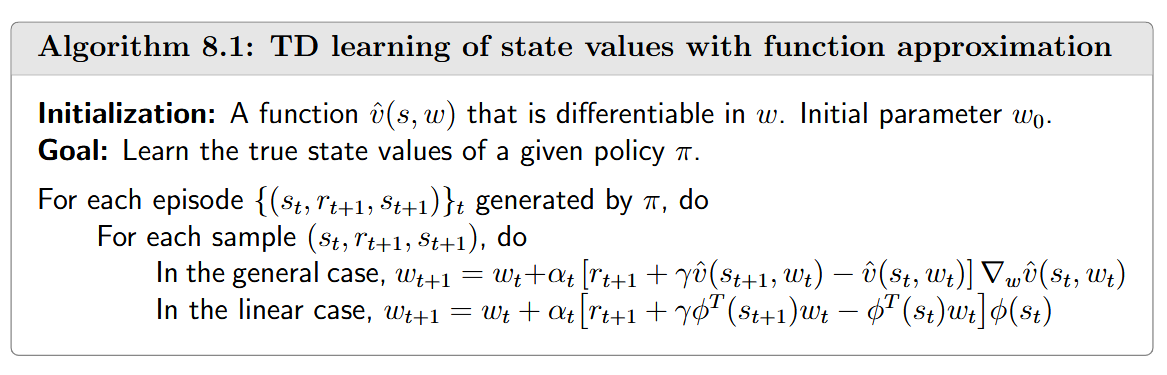
- 线性函数近似
- 特征向量类型
理论分析
收敛性分析
TD算法的收敛性可以通过分析以下确定性算法来研究:
(10)式可以看作是(11)式的 SGD实现,这个式子初看起来比较复杂,实际非常简单,我们可以做一些简化,
其中 是包含所有特征向量的矩阵, 是对角阵,其对角线是稳态分布。这两个矩阵将经常使用。
(11)式 可以重写为:
其中:
证明可以参考Mathematical Foundations of Reinforcement Learning中的Box 8.3
此时,(11)式可以写为
这是一个简单的确定性过程,其收敛性分析如下。
首先, 的收敛值是什么?假设当 时, 收敛到一个常数值 ,那么根据 (12)式:
这表明 ,因此:
关于这个收敛值,有几点重要的说明:
🧾 ****
这种收敛性分析表明,TD-线性算法在适当条件下会收敛到最优参数值,这个参数值不仅能够最小化投影贝尔曼误差,而且在特殊情况下(表格表示)恰好等于真实状态值。
TD Learning与投影贝尔曼误差(projected Bellman error)
我们之前已经证明TD-线性算法收敛到 ,接下来我们将证明 是最小化投影贝尔曼误差的最优解。为此,我们回顾三种目标函数。
- 状态值误差
- 贝尔曼误差
- 投影贝尔曼误差
由于TD算法旨在最小化 而非 ,自然要问估计值 与真实状态值 的接近程度。在线性情况下,最小化投影贝尔曼误差的估计值是 。它与真实状态值 的偏差满足:
这个不等式的证明在Mathematical Foundations of Reinforcement Learning中的Box 8.6中给出。
不等式(17)表明 与 之间的差距上界是 的最小值。然而,这个界限较松,特别是当 接近1时。因此,它主要具有理论价值。
最小二乘时序差分(LSTD)
接下来我们介绍一种称为最小二乘时序差分(LSTD)的算法。与TD-线性算法一样,LSTD旨在最小化投影贝尔曼误差。然而,它比TD-线性算法有一些优势。
回顾最小化投影贝尔曼误差的最优参数是 ,其中 和 。实际上, 和 也可以写为(参考Mathematical Foundations of Reinforcement LearningBox 8.1):
上面两个等式表明 和 是 , , 的期望。LSTD的思想很简单:如果我们可以使用随机样本直接获得 和 的估计值(分别记为 和 ),那么最优参数可以直接估计为 。
具体来说,假设 是通过遵循给定策略 获得的轨迹。设 和 分别是时间 时 和 的估计值。它们计算为样本的平均值: