RNN
概述
在前面讲到的DNN和CNN中,训练样本的输入和输出是比较的确定的。但是有一类问题DNN和CNN不好解决,就是训练样本输入是连续的序列,且序列的长短不一,比如基于时间的序列:一段段连续的语音,一段段连续的手写文字。这些序列比较长,且长度不一,比较难直接的拆分成一个个独立的样本来通过DNN/CNN进行训练。
而对于这类问题,RNN则比较的擅长。那么RNN是怎么做到的呢?RNN假设我们的样本是基于序列的。比如是从序列索引1到序列索引\(τ\) 。对于这其中的任意序列索引号 \(t\),它对应的输入是对应的样本序列中的 \(x(t)\)。而模型在序列索引号 \(t\) 位置的隐藏状态 \(h(t)\),则由\(x(t)\)和在\(t−1\)位置的隐藏状态\(h(t−1)\)共同决定。在任意序列索引号 \(t\),我们也有对应的模型预测输出 \(o(t)\)。通过预测输出 \(o(t)\)和训练序列真实输出 \(y(t)\),以及损失函数 \(L(t)\),我们就可以用DNN类似的方法来训练模型,接着用来预测测试序列中的一些位置的输出。
下面我们来看看RNN的模型。
模型
RNN模型有比较多的变种,这里介绍最主流的RNN模型结构如下:
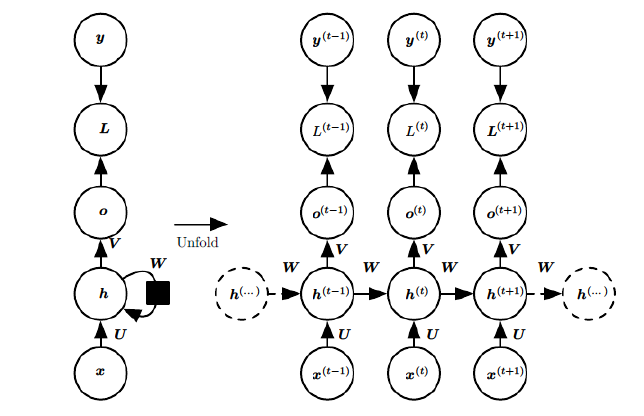
上图中左边是RNN模型没有按时间展开的图,如果按时间序列展开,则是上图中的右边部分。我们重点观察右边部分的图。
这幅图描述了在序列索引号 \(t\) 附近RNN的模型。其中:
- \(𝑥(𝑡)\) 代表在序列索引号\(t\)时训练样本的输入。同样的,\(x(t−1)\)和x(t+1)代表在序列索引号\(t−1\)和\(t+1\)时训练样本的输入。
- \(h(t)\)代表在序列索引号\(t\)时模型的隐藏状态。\(h(t)\)由\(x(t)\)和\(h(t−1)\)共同决定。
- \(o(t)\)代表在序列索引号\(t\)时模型的输出。\(o(t)\)只由模型当前的隐藏状态\(h(t)\)决定。
- \(𝐿(𝑡)\)代表在序列索引号\(t\)时模型的损失函数。
- \(y(t)\)代表在序列索引号\(t\)时训练样本序列的真实输出。
- \(U,W,V\)这三个矩阵是我们的模型的线性关系参数,它在整个RNN网络中是共享的,这点和DNN很不相同。 也正因为是共享了,它体现了RNN的模型的“循环反馈”的思想。
前向传播算法
有了上面的模型,RNN的前向传播算法就很容易得到了。
对于任意一个序列索引号\(t\),我们隐藏状态\(h(t)\)由\(𝑥(𝑡)\)和\(ℎ(𝑡−1)\)得到:
其中 \(σ\) 为RNN的激活函数,一般为\(tanh\), \(b\)为线性关系的偏倚。
序列索引号\(t\)时模型的输出\(𝑜(𝑡)\)的表达式比较简单:
在最终在序列索引号\(𝑡\)时我们的预测输出为:
通常由于RNN是识别类的分类模型,所以上面这个激活函数一般是softmax。
通过损失函数\(𝐿(𝑡)\),比如对数似然损失函数,我们可以量化模型在当前位置的损失,即\(\hat{y}(t)\)和\(y(t)\)的差距。
反向传播算法推导
有了RNN前向传播算法的基础,就容易推导出RNN反向传播算法的流程了。RNN反向传播算法的思路和DNN是一样的,即通过梯度下降法一轮轮的迭代,得到合适的RNN模型参数\(U,W,V,b,c\)。由于我们是基于时间反向传播,所以RNN的反向传播有时也叫做BPTT(back-propagation through time)。当然这里的BPTT和DNN也有很大的不同点,即这里所有的\(U,W,V,b,c\)在序列的各个位置是共享的,反向传播时我们更新的是相同的参数。
为了简化描述,这里的损失函数我们为交叉熵损失函数,输出的激活函数为softmax函数,隐藏层的激活函数为tanh函数。
对于RNN,由于我们在序列的每个位置都有损失函数,因此最终的损失\(L\)为:
其中\(𝑉,𝑐\) 的梯度计算是比较简单的:
但是\(𝑊,𝑈,𝑏\) 的梯度计算就比较的复杂了。从RNN的模型可以看出,在反向传播时,在在某一序列位置\(t\)的梯度损失由当前位置的输出对应的梯度损失和序列索引位置\(𝑡+1\)时的梯度损失两部分共同决定。对于𝑊在某一序列位置t的梯度损失需要反向传播一步步的计算。我们定义序列索引\(𝑡\) 位置的隐藏状态的梯度为:
这样我们可以像DNN一样从\(\delta^{(𝑡+1)}\)递推\(\delta^{(𝑡)}\) 。
对于\(\delta^{(\tau)}\),由于它的后面没有其他的序列索引了,因此有:
有了\(\delta^{(𝑡)}\),计算\(𝑊,𝑈,𝑏\)就容易了,这里给出\(𝑊,𝑈,𝑏\)的梯度计算表达式:
除了梯度表达式不同,RNN的反向传播算法和DNN区别不大,因此这里就不再重复总结了。
RNN小结
上面总结了通用的RNN模型和前向反向传播算法。当然,有些RNN模型会有些不同,自然前向反向传播的公式会有些不一样,但是原理基本类似。
RNN虽然理论上可以很漂亮的解决序列数据的训练,但是它也像DNN一样有梯度消失时的问题,当序列很长的时候问题尤其严重。因此,上面的RNN模型一般不能直接用于应用领域。在语音识别,手写书别以及机器翻译等NLP领域实际应用比较广泛的是基于RNN模型的一个特例LSTM.
LSTM
从RNN到LSTM
在RNN模型里,我们讲到了RNN的结构,每个序列索引位置\(t\)都有一个隐藏状态\(h(t)\)。
如果我们略去每层都有的\(𝑜(𝑡),𝐿(𝑡),𝑦(𝑡)\),则RNN的模型可以简化成如下图的形式:
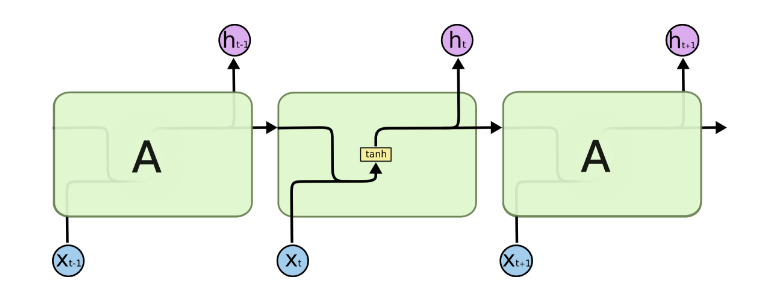
图中可以很清晰看出在隐藏状态\(ℎ(𝑡)\)由\(x(t)\)和\(h(t−1)\)得到。得到\(h(t)\)后一方面用于当前层的模型损失计算,另一方面用于计算下一层的\(ℎ(𝑡+1)\)。
由于RNN梯度消失的问题,大牛们对于序列索引位置\(t\)的隐藏结构做了改进,可以说通过一些技巧让隐藏结构复杂了起来,来避免梯度消失的问题,这样的特殊RNN就是我们的LSTM。由于LSTM有很多的变种,这里我们以最常见的LSTM为例讲述。LSTM的结构如下图:
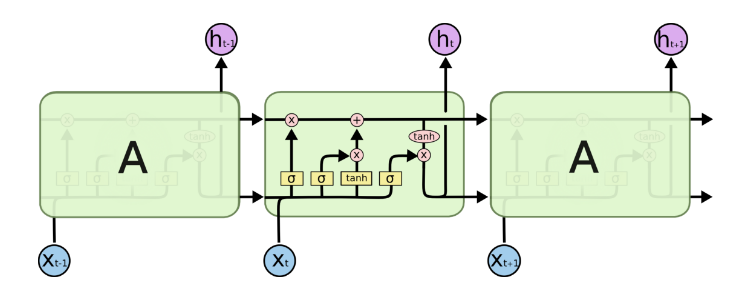
可以看到LSTM的结构要比RNN的复杂的多,真佩服牛人们怎么想出来这样的结构,然后这样居然就可以解决RNN梯度消失的问题?由于LSTM怎么可以解决梯度消失是一个比较难讲的问题,我也不是很熟悉,这里就不多说,重点回到LSTM的模型本身。
LSTM模型结构剖析
上面我们给出了LSTM的模型结构,下面我们就一点点的剖析LSTM模型在每个序列索引位置t时刻的内部结构。
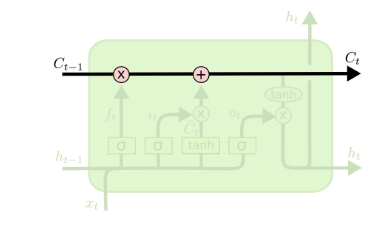
从上图中可以看出,在每个序列索引位置 \(t\) 时刻向前传播的除了和RNN一样的隐藏状态\(ℎ(𝑡)\),还多了另一个隐藏状态,如图中上面的长横线。这个隐藏状态我们一般称为细胞状态(Cell State),记为\(C(t)\)。如下图所示:
除了细胞状态,LSTM图中还有了很多奇怪的结构,这些结构一般称之为门控结构(Gate)。LSTM在在每个序列索引位置t的门一般包括遗忘门,输入门和输出门三种。下面我们就来研究上图中LSTM的遗忘门,输入门和输出门以及细胞状态。
遗忘门(forget gate)
遗忘门(forget gate)顾名思义,是控制是否遗忘的,在LSTM中即以一定的概率控制是否遗忘上一层的隐藏细胞状态。遗忘门子结构如下图所示:
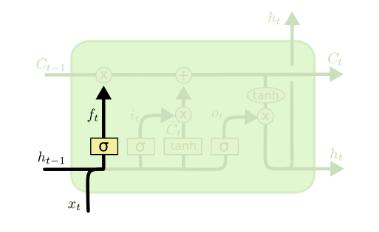
图中输入的有上一序列的隐藏状态\(ℎ(𝑡−1)\)和本序列数据\(𝑥(𝑡)\),通过一个激活函数,一般是sigmoid,得到遗忘门的输出\(𝑓(𝑡)\)。由于sigmoid的输出\(𝑓(𝑡)\)在\([0,1]\)之间,因此这里的输出\(f^{(t)}\)代表了遗忘上一层隐藏细胞状态的概率。用数学表达式即为:
其中\(W_f,U_f,b_f\)为线性关系的系数和偏倚,和RNN中的类似。\(σ\)为sigmoid激活函数。
输入门(input gate)
输入门(input gate)负责处理当前序列位置的输入,它的子结构如下图:
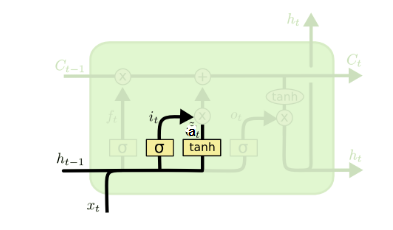
从图中可以看到输入门由两部分组成,第一部分使用了sigmoid激活函数,输出为\(𝑖(𝑡)\),第二部分使用了\(tanh\)激活函数,输出为\(𝑎(𝑡)\), 两者的结果后面会相乘再去更新细胞状态。用数学表达式即为:
其中\(W_i,U_i,b_i,W_a,U_a,b_a\),为线性关系的系数和偏倚,和RNN中的类似。\(σ\)为sigmoid激活函数。
细胞状态更新(cell state)
在研究LSTM输出门之前,我们要先看看LSTM之细胞状态。前面的遗忘门和输入门的结果都会作用于细胞状态\(C(t)\)。我们来看看从细胞状态\(C(t−1)\)如何得到\(C(t)\)。如下图所示:
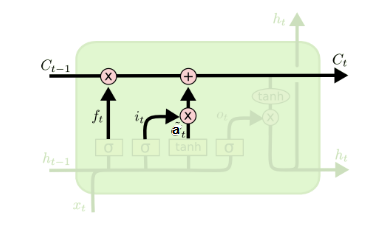
细胞状态𝐶(𝑡)由两部分组成,第一部分是\(𝐶(𝑡−1)\)和遗忘门输出\(𝑓(𝑡)\)的乘积,第二部分是输入门的\(𝑖(𝑡)\)和\(𝑎(𝑡)\)的乘积,即:
其中,\(⊙\)为Hadamard积(element-wise),在DNN中也用到过。
输出门(output gate)
有了新的隐藏细胞状态\(C(t)\),我们就可以来看输出门了,子结构如下:
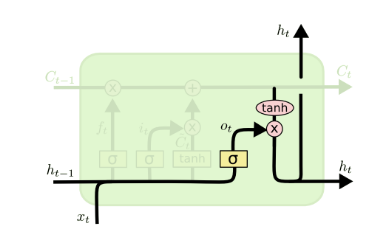
从图中可以看出,隐藏状态\(ℎ(𝑡)\)的更新由两部分组成,第一部分是\(𝑜(𝑡)\), 它由上一序列的隐藏状态\(ℎ(𝑡−1)\)和本序列数据\(𝑥(𝑡)\),以及激活函数sigmoid得到,第二部分由隐藏状态\(𝐶(𝑡)\)和\(tanh\)激活函数组成, 即:
通过本节的剖析,相信大家对于LSTM的模型结构已经有了解了。当然,有些LSTM的结构和上面的LSTM图稍有不同,但是原理是完全一样的。
前向传播算法
现在我们来总结下LSTM前向传播算法。LSTM模型有两个隐藏状态\(ℎ(𝑡),𝐶(𝑡)\),模型参数几乎是RNN的4倍,因为现在多了\(W_f,U_f,b_f,W_a,U_a,b_a,W_i,U_i,b_i,W_o,U_o,b_o\)这些参数。
前向传播过程在每个序列索引位置的过程为:
- 更新遗忘门输出:
- 更新输入门两部分输出:
- 更新细胞状态:
- 更新输出门输出:
- 更新当前序列索引预测输出:
反向传播算法推导关键点
有了LSTM前向传播算法,推导反向传播算法就很容易了, 思路和RNN的反向传播算法思路一致,也是通过梯度下降法迭代更新我们所有的参数,关键点在于计算所有参数基于损失函数的偏导数。
在RNN中,为了反向传播误差,我们通过隐藏状态\(ℎ(𝑡)\)的梯度\(δ(t)\)一步步向前传播。在LSTM这里也类似。只不过我们这里有两个隐藏状态\(h(t)\)和\(C(t)\)。这里我们定义两个\(δ\),即:
为了便于推导,我们将损失函数\(𝐿(𝑡)\)分成两块,一块是时刻\(𝑡\)位置的损失\(𝑙(𝑡)\),另一块是时刻\(𝑡\)之后损失\(𝐿(𝑡+1)\),即:
而在最后的序列索引位置\(\tau\)的\(\delta^{(\tau)}_ℎ\)和 \(\delta^{(\tau)}_𝐶\)为:
接着我们由\(δ_C^{(t+1)},δ_h^{(t+1)}\)反向推导\(δ_h^{(t)},δ_C^{(t)}\)。
\(δ_h^{(t)}\)的梯度由本层\(t\)时刻的输出梯度误差和大于\(t\)时刻的误差两部分决定,即:
整个LSTM反向传播的难点就在于\(\frac{∂ℎ^{(𝑡+1)}}{∂ℎ^{(𝑡)}}\)这部分的计算。仔细观察,由于\(ℎ(𝑡)=𝑜(𝑡)⊙𝑡𝑎𝑛ℎ(𝐶(𝑡))\), 在第一项\(𝑜(𝑡)\)中,包含一个\(ℎ\)的递推关系,第二项\(𝑡𝑎𝑛ℎ(𝐶(𝑡))\)就复杂了,\(𝑡𝑎𝑛ℎ\)函数里面又可以表示成:
\(𝑡𝑎𝑛ℎ\)函数的第一项中,\(𝑓(𝑡)\)包含一个\(ℎ\)的递推关系,在\(𝑡𝑎𝑛ℎ\)函数的第二项中,\(𝑖(𝑡)\)和\(𝑎(𝑡)\)都包含\(ℎ\)的递推关系,因此,最终\(\frac{∂ℎ^{(𝑡+1)}}{∂ℎ^{(𝑡)}}\)这部分的计算结果由四部分组成。即:
而\(\delta^{(𝑡)}_𝐶\)的反向梯度误差由前一层\(\delta^{(𝑡+1)}_𝐶\)的梯度误差和本层的从\(ℎ(𝑡)\)传回来的梯度误差两部分组成,即:
有了\(\delta^{(𝑡)}_ℎ\)和\(\delta^{(𝑡)}_𝐶\), 计算这一大堆参数的梯度就很容易了,这里只给出\(𝑊_𝑓\)的梯度计算过程,其他的\(𝑈_𝑓,𝑏_𝑓,𝑊_𝑎,𝑈_𝑎,𝑏_𝑎,𝑊_𝑖,𝑈_𝑖,𝑏_𝑖,𝑊_𝑜,𝑈_𝑜,𝑏_𝑜,𝑉,𝑐\)的梯度大家只要照搬就可以了。
LSTM小结
LSTM虽然结构复杂,但是只要理顺了里面的各个部分和之间的关系,进而理解前向反向传播算法是不难的。当然实际应用中LSTM的难点不在前向反向传播算法,这些有算法库帮你搞定,模型结构和一大堆参数的调参才是让人头痛的问题。不过,理解LSTM模型结构仍然是高效使用的前提。