论文地址:https://arxiv.org/pdf/2107.11291
代码地址:https://github.com/Jeff-sjtu/res-loglikelihood-regression
前言

一般来说,我们可以把姿态估计任务分成两个流派:Heatmap-based和Regression-based。
其主要区别在于监督信息的不同,Heatmap-based方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或soft-argmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。
Regression-based方法则非常简单粗暴,直接监督模型学习坐标值,计算坐标值的L1或L2 loss。由于不需要渲染高斯热图,也不需要维持高分辨率,网络输出的特征图可以很小(比如14x14甚至7x7),拿Resnet-50来举例的话,FLOPs是Heatmap-based方法的两万分之一,这对于计算力较弱的设备(比如手机)是相当友好的,在实际的项目中,也更多地是采用这种方法。
说到Regression-based方法的优点,可以简单总结为以下三点:
- 没有高分辨率热图,无负一身轻。计算成本和内存开销一起大幅降低。
- 输出为连续的,不用担心量化误差。(Heatmap-based输出的热图最大值点在哪,对应到原图的点也就确定了,输出热图的分辨率越小,这个点放大后对应回去就越不准。Regression-based输出为一个数值,小数点后可以有很多位,精度不受缩放影响)
- 可拓展性高。不论是one-stage还是two-stage,image-based还是video-based,2D还是3D,Regression-based方法都可以一把梭。此前就有用这种方法来将2D和3D数据放在一起联合训练的文章。这是Heatmap-based方法做不到的,因为输出是高度定制化的,2D输出必须渲染2D高斯热图,3D就必须渲染3D的高斯热图,计算量和内存开销也蹭蹭蹭地暴涨。
而Heatmap-based方法通过显式地渲染高斯热图,让模型学习输出的目标分布,也可以看成模型单纯地在学习一种滤波方式,将输入图片滤波成为最终希望得到的高斯热图即可,这极大地简化了模型的学习难度,且非常契合卷积网络的特性(卷积本身就可以看成一种滤波),并且这种方式规定了学习的分布,相对于除了结果以外内部一切都是黑盒的Regression-based方法,对于各种情况(遮挡、动态模糊、截断等)要鲁棒得多。基于以上种种优点,Heatmap-based方法在姿态估计领域是处于主导地位的,SOTA方案也都是基于此,这也导致了一种学术研究与算法落地的割裂,你在各种数据集和比赛里指标刷得飞起,但项目落地时我们工程师却只能干着急,因为你用的方法又慢又吃内存,真实项目里根本没法用啊。
终于,这一天有篇文章站出来说,重铸Regression荣光,吾辈义不容辞!不仅将Regression-based方法提到了超越Heatmap-based方法的高度,还保留了其一直以来的节省计算资源和内存资源的优点,真正做到了又快又准,简直是项目落地算法工程师的福音,接下来就让我们一起来学习一下这篇文章。

从极大似然估计(Maximum Likelihood Estimation, MLE)的角度来看问题,损失函数的选择其实是基于我们对目标分布的假设的,如果我们假设目标分布服从高斯分布,那么损失函数就应该选择L2 loss,如果假设为拉普拉斯分布,则应该选择L1 loss。
这里其实我还延申出来一个理解,早一些时候的文章大家都选择L2 loss作为损失函数,但近来越来越多的文章选择L1 loss,并且有详实的实验显示L1在大多数情况下都会优于L2,对于这个现象我一开始是作为一种实验得到的经验结论进行记忆的,但到这里我才理解,选择L2其实是一件很自然的事情,因为高斯分布具有大量优秀的特性:采样方便、解析的密度已知、KL距离容易计算,还有中心极限定理的保证——任何大的数据都趋近于高斯分布,所以你怎么用它几乎都是对的。但对于姿态估计任务而言,由于要精确地预测关键点位置,实际上概率分布是相对来说比较稀疏的,只有小部分区域具有概率,因此将拉普拉斯分布作为先验可能是一种更好的假设。
从这个视角来思考,我们其实可以把Heatmap-based方法看成是对模型的中间结果进行了监督,显式地要求模型学习高斯概率分布,进而得出结果;而Regression-based方法由于缺少对概率分布的监督约束,模型内部学到的分布是不稳定的,完全受到训练数据的支配,因此在性能和鲁棒性上逊于Heatmap-based方法也就不难想象了。
因此我们也可以知道,一个正确的密度函数假设对优化结果是起到主导性作用的。但在实际问题中,目标的分布是未知的,我们所掌握的数据也是有限的,模型很难单纯通过数据回归出真实的密度函数,有没有比草率地假设某一个分布更好的选择呢?有的,这里我们将引入这篇文章的核心之一,标准化流(Normalizing Flows)。
背景/动机
从高斯热图说起
众所周知,姿态估计分为坐标回归和热图回归两派,我一开始接触的就是热图回归。而热图回归中的热图一直以来都使用手工设计 \(σ\) 的二维独立高斯分布。热图上某一位置 \(x=(i,j)\) 的值则为
其中 \(\bm{\mu} = (\mathbf{\mu}_x, \mathbf{\mu}_y)\) 是该输入图片中该关键点的真实坐标点。那么为什么使用高斯分布呢?
坐标误差分布

便于理解,可以先从坐标回归的 \(L_2\) 损失函数看起。坐标回归直接预测特征点坐标 \(\bm{\hat\mu} \)(有的也会同时预测 \(\bm{\hat\sigma}\) ,代表误差分布的方差),而 \(L_2\) 损失函数为:
我们这边只先关注某一个关键点,如左肩膀。这个损失函数十分直观,即让预测的坐标点接近真实坐标点。它其实是由误差符合高斯分布的假设并经过极大似然估计而得。
极大似然估计
我们假设误差 \(\bm{\epsilon}=\bm{\mu-\hat\mu}\) 符合期望为0、方差为 \(\bm{\hat\sigma}\) 的高斯分布:
这里预测了 \(\hat\sigma\),代表对于不同人体特征点,误差分布的方差不同。
可以认为坐标回归预测了一个期望为 \(\bm{\hat\mu}\) 、方差为 \(\bm{\hat\sigma}\) 的高斯分布,即预测真实特征点的坐标在某一点 \(\mathbf{x}\) 的概率满足该分布:
这一假设便是为什么热图回归中的热图采用高斯分布。而实际上我们观察到的样本为 \(\mu\) ,那么采用极大似然估计法,我们就应该最大化 \(p_\Theta(\mu)\) :
如果我们假设 \(\bm{\hat\sigma}\) 是常数,就可以从(5)得到 (2)。
如果使用拉普拉斯分布假设可以获得更好的性能,对应着 \(L_1\) 损失函数。一个更接近真实误差分布的分布假设,应该能够有更好的性能,如下图所示。
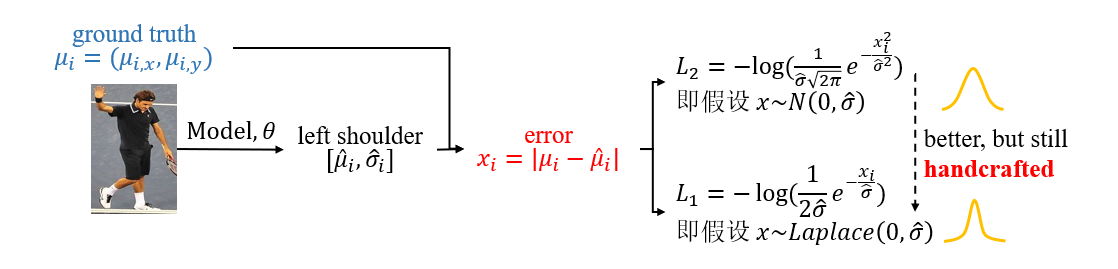
因此,更准确的概率密度函数可以带来更好的结果。然而,由于底层分布的解析表达式是未知的,该模型不能简单地回归几个值来构造密度函数,如(5)来估计潜在分布并促进人体姿势回归,在下一节中,作者通过利用 normalized flow 来拟合更真实的分布 得到一种更新颖的回归范例。
标准化流
标准化流是一类深度生成式模型,具体的数学原理有兴趣的朋友可以自行搜索,我这里比较肤浅地将其理解为,通过构造一个可逆的变换函数,能将一些基本的简单分布(如高斯分布)变换为任意的复杂分布。
这里用李宏毅老师的视频截图来进行直观展示,通过一系列可逆变换的叠加,可以将简单分布变换成任意的复杂分布:
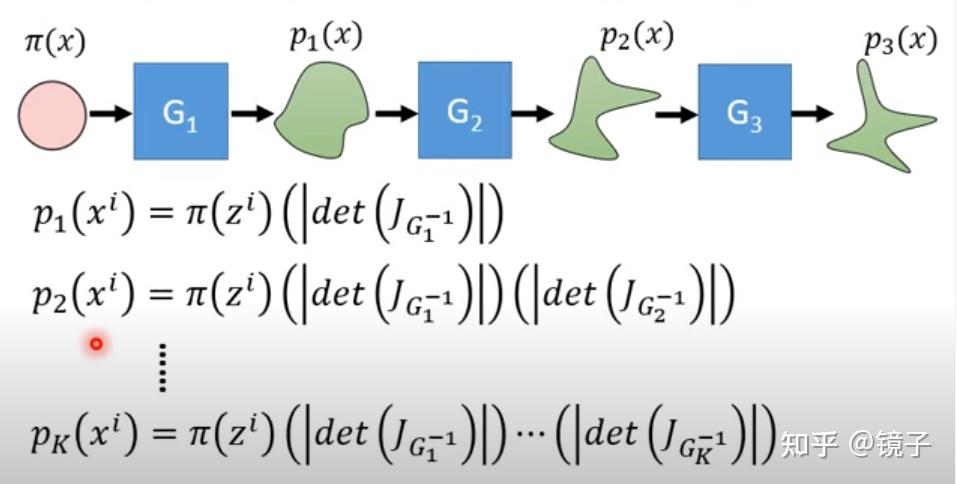
换句话说,虽然现阶段我们条件有限,我们的回归模型只能拟合一个简单分布,但我可以对拟合出来的结果进行变换,让变换后的结果更接近真实分布,只要我的变换足够复杂,理论上我可以拟合任意的目标分布。而这里的变换,实际上也就是我们的神经网络,因为神经网络理论上可以逼近任意的函数,因此流模型中那一系列叠加的可逆变换可以通过叠加的FC层实现。也就是说,我们将网络学习的目标,从让网络直接拟合目标分布,变成了拟合简单分布+流模型变换调整两个步骤。
具体关于flow的概念可以查看这里:Normalizing flow
Designs
Basic Design
正则化流是一种通过可逆映射将简单分布转换成复杂分布的方法。它的核心思想是:
- 从一个简单的初始分布(如高斯分布)开始。
- 使用一个光滑且可逆的映射,将初始分布的随机变量 \(z\) 映射到目标变量 \(x\) 。
- 通过这种方式,构建能够拟合复杂分布的概率模型。
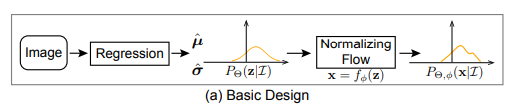
假设初始分布 \(P_\Theta(z|I)\)是一个随机变量 \( z\) 的概率密度函数,它由回归模型 \(\Theta\) 的输出参数 \(\bm{\hat\mu}\) 和 \(\bm{\hat\sigma}\) 定义。并假设初始分布是高斯分布:
通过一个光滑且可逆的映射 \(f_\phi\) ,将 \(z\) 映射到 \(x\) :\(x = f_\phi(z)\)
其中:
- \(f_\phi\) 是由可学习参数 \(\phi\) 定义的正则化流模型。
- \(f_\phi\) 的作用是将简单的初始分布 \(P_\Theta(z|I)\) 转换为目标分布 \(P_{\Theta,\phi}(x|I)\)。
映射后的变量 \(x\) 遵循新的分布 \(P_{\Theta,\phi}(x|I)\)。其概率密度函数可以通过以下公式计算:
其中:
- \(f_\phi^{-1}\) 是 \(f_\phi\) 的逆映射,即 \(z = f_\phi^{-1}(x)\) 。
- \(\det \frac{\partial f_\phi^{-1}}{\partial x}\) 是逆映射的雅可比行列式。
通过这个公式,可以从任意的 \( x\) 反向推导出 \(z\),并估计对应的对数概率。
为了构造足够复杂的映射函数 \(f_\phi\) ,可以将多个简单的映射按顺序组合起来:
这意味着最终的映射是通过多个简单映射 \(f_1, f_2, \cdots, f_K\) 的复合构成的。
为了训练模型,采用 最大似然估计(Maximum Likelihood Estimation, MLE)的方法。目标是最大化数据在模型分布下的对数概率。对数似然的损失函数定义为:
将映射函数 \( f_\phi \) 和初始分布 \(P_\Theta(z|I)\)代入后,损失函数可以写为:
其中 \( \mu_g\) 是目标位置。
需要注意的是,目标分布 \(P_{\text{opt}}(x|I)\) 是未知的。正则化流模型通过最大化标注数据的对数似然来进行无监督学习。
对于某些具有挑战性的情况(如遮挡导致的标注误差较大),模型会自适应地预测一个具有较大方差的分布,以提高对数概率。
Reparameterization
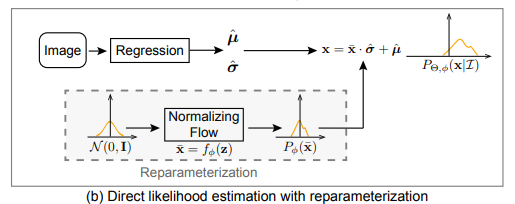
所以作者又提出了一种重参数化的方式来拟合最终概率密度函数:
- 假设所有潜在分布属于同一类概率密度函数(例如高斯分布),但均值和方差由输入\(I\) 条件化。
- 通过重参数化,简化学习过程,使模型能够专注于学习分布的形状和偏差。
具体来说,首先正则化流模型 \(f_\phi\) 被用来将零均值初始分布 \(\tilde{z} \sim \mathcal{N}(0, \mathbf{I}) \) 映射为一个零均值的变形分布 \(\tilde{x} \sim P_\phi(\tilde{x})\)。
回归模型 \(f_\Theta\) 输出两个值:
- \(\hat{\mu}\)(均值):用于控制分布的位置。
- \(\hat\sigma\)(标准差):用于控制分布的尺度。
最终分布 \( P_{\Theta,\phi}(x|I)\) 是通过对 \(\tilde{x} \) 进行平移和缩放得到的:
其中:
- \(\hat{\mu}\) 是回归模型预测的均值。
- \(\hat{\sigma} \) 是回归模型预测的标准差。
在引入重参数化后,最大似然估计的损失函数可以写为:
其中,\(\tilde{\mu}_g = (\mu_g - \hat{\mu}) / \hat{\sigma}\) 表示目标值 \(\mu_g\) 与预测值 \(\hat{\mu}\) 的偏差,经过标准化处理。 故,\(\frac{\partial \tilde{\mu}_g}{\partial \mu_g} = 1 / \hat{\sigma} \) 偏导数是标准差的倒数。
通过引入重参数化设计:
- 模型的学习重点转移到 \(\tilde{\mu}_g\) 的分布上。
- \(\tilde{\mu}_g\) 反映了预测值与真实值之间的偏差。
- 这种设计能够更好地分离分布的形状(由 \(f_\phi \) 学习)和位置/尺度(由 \(\Theta\) 学习)。
Residual Log-likelihood Estimation
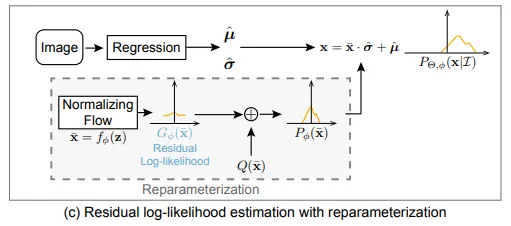
在重参数化之后,回归框架可以以端到端的方式进行训练。回归值 \(\tilde\mu\) 和流模型 \(f_\phi\) 的训练是耦合的,这取决于损失函数((7))中的项 \(\log P_\phi(\mu_g)\) 。然而,这两个模型之间存在复杂的依赖关系:
- 回归模型的训练完全依赖于流模型 \(f_\phi\) 所估计的分布。
- 在训练初期,分布的形状可能不准确,这会增加回归模型训练的难度,并可能降低模型性能。
为了简化训练过程,我们设计了一种梯度捷径来减少这两个模型之间的依赖关系。
流模型 \(f_\phi\) 估计的分布 \(P_\phi(\tilde{x})\) 试图拟合最优的底层分布 \(P_{\text{opt}}(\tilde{x})\) ,其对数分布可以分解为三项:
其中 \(Q(\tilde{x})\) 是一个简单的分布(例如高斯分布 \(\mathcal{N}(0, I)\)),\(\log \frac{P_{\text{opt}}(\tilde{x})}{s \cdot Q(\tilde{x})}\) 是我们称之为残差对数似然(Residual Log-likelihood) 的部分。\(s\) 是一个常数,用于确保残差项是一个分布。
我们假设 \(Q(\tilde{x})\) 可以大致匹配底层分布,但并不完全一致。残差对数似然用于补偿这种差异。
类似地,流模型 \(f_\phi\) 学习到的分布 \(P_\phi(\tilde{x})\) 也可以分解为:
其中,\(G_\phi(\tilde{x})\) 是流模型学习到的分布。通过这种方式,\(G_\phi(\tilde{x})\) 将尝试拟合底层的残差似然 \(\frac{P_{\text{opt}}(\tilde{x})}{Q(\tilde{x})}\),而不是学习整个分布。
结合重参数化设计((7))和残差对数似然估计((9)),总损失函数可以定义为:
其中 \(\tilde{\mu}_g = (\mu_g - \hat{\mu}) / \hat{\sigma}\) 为标准化的目标值,\(\log Q(\tilde{\mu}g)\) 为简单分布的对数概率,而\(\log G\phi(\tilde{\mu}_g)\) 是流模型学习的残差分布。
实验
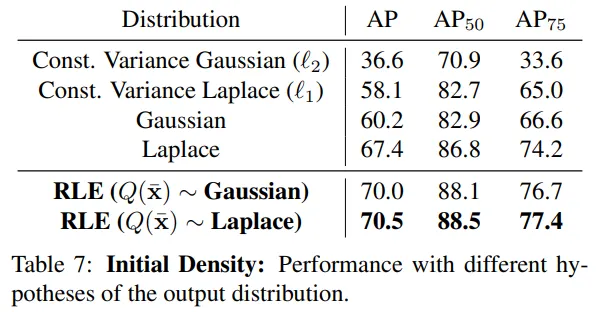
这里对比了这个简单分布的形式用高斯分布和拉普拉斯分布的对比,可以看出拉普拉斯效果会好一些。
Reference
图解论文核心思路:[ICCV21 Oral] Human Pose Regression with Residual Log-likelihood Estimation