Soft-NMS/DIoU-NMS
soft-nms参考:
可以看到,Soft-NMS与传统NMS的区别在于对score分数调整的处理。如果是传统的NMS操作,那么当\(B\) 中的 \(b_i\) 和 \(\mathbf{M}\) 的IoU值大于阈值 \(N_t\),那么就从 \(B\) 和 \(S\) 中去除该box;对于Soft-NMS而言是先计算 \(\mathbf{M}\) 与 \(b_i\) 的IoU,然后IoU经过一个函数输出最后与 \(s_i\) 相乘最终得到box的分数。
其中 \(s_i\) 的score遵循IoU越大,分数越低的原则(IoU越大,越可能是背景),所以\(s_i\) 定义如下:

考虑到上式是不连续的,并且当达到N_t的NMS阈值时会施加突然的惩罚, 如果惩罚函数是连续的,那将是理想的,否则它可能导致检测结果的排序列表的突然改变(集合D中的score出现断层跳跃现象)。所以 \(s_i\) 的更新公式修改为如下:

这样就避免了检测结果中的score会出现突然间的跳跃现象。
DIoU-NMS需要了解DIoU,它两在同一篇论文被提出,关于DIoU知识:
在传统NMS中,IoU指标常用于抑制冗余检测盒,其中重叠区域是唯一因素,对于遮挡情况经常产生错误抑制。 DIoU-NMS将DIoU作为NMS的准则,因为在抑制准则中不仅应考虑重叠区域,而且还应考虑两个box之间的中心点距离,而DIoU就是同时考虑了重叠区域和两个box的中心距离。 对于score最高的预测box \(M\),可以将DIoU-NMS 的 \(s_i\) 更新公式正式定义为:

其中通过同时考虑IoU和两个box的中心点之间的距离来删除box \(B_i\),\(s_i\) 是分类得分,ε是NMS阈值。DIoU-NMS建议两个中心点较远的box可能位于不同的对象上,不应将其删除(这就是DIoU-NMS的与NMS的最大不同之处)。
RepLoss
问题引入
常见的遮挡问题可以再被细分为主要两类
- 类间遮挡,即目标被其他类遮挡住。举个例子,一个行人遛狗,人体下半部分就可能被狗狗遮住
- 类内遮挡,目标物体被同类遮挡住,在我们问题里面也就是行人遮挡。
我们思考一下行人遮挡会对检测器造成什么影响。 假设我们目标行人是 T,旁边被另外一个行人 B 所遮挡。那么 B 的真实框会导致我们对 T 的预测框 P,往 B 去移动 (shift),造成类似下图的情况
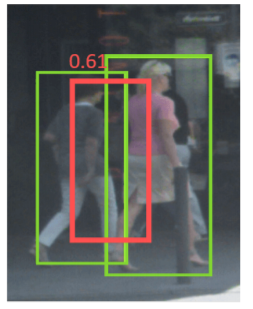
另外我们再考虑下目标检测常用的后处理 NMS,非极大值抑制。NMS 操作是为了抑制去除掉多余的框。 但是在行人检测中,NMS 操作会带来更糟糕的检测结果。 还是刚刚的例子,我对 T 有一个预测框 P,但因为距离 B 靠的太近,我可能会被 B 的预测框给抑制,导致行人检测中出现漏检。这也从另外一个侧面反映出行人检测对 NMS 阈值的敏感性,阈值太低了会带来漏检,阈值太高了会带来假正例(即标出错误的目标)
因此如何稳定的检测出群体中个体行人是行人检测器的关键。
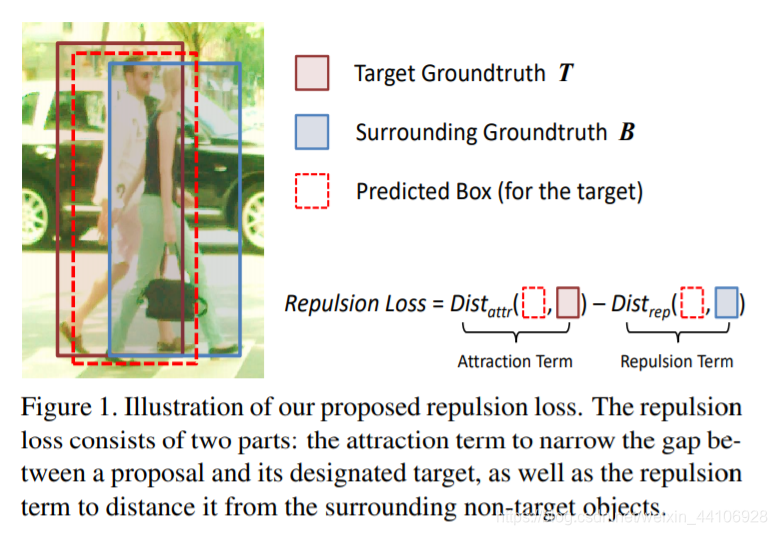
现有的方法仅仅要求预测框尽可能靠近目标框,而没有考虑周围附近的物体。 受磁铁同性相斥,异性相吸的原理,我们提出了一种 RepLoss 新的损失函数
该损失函数在要求预测框 P 靠近目标框 T(吸引) 的同时,也要求预测框 P 远离其他不属于目标 T 的真实框 (排斥) 该损失函数很好的提升了行人检测模型的性能,并且降低了 NMS 对阈值的敏感性
Repulsion Loss
前面分析了这么多错误,现在才是重头戏 Repulsion Loss 主要由三部分构成
\(L_{Attr}\) 是为了预测框更接近真实框 (即吸引)
\(L_{rep}\) 则是为了让预测框远离周围的真实框 (即排斥)
参数α和β用于平衡两者的权重
我们设 \(P(lP , tP , wP , hP)\) 为候选框, $G(lG, tG, wG, hG) $为真实框
\(P_+\) 为正候选框集合,正候选框的意思是,至少与其中一个真实框的 IoU 大于某个阈值,这里是 0.5, g = {G} 是真实框集合
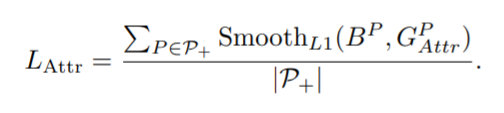
Attraction term
这一项 loss 在其他算法也广泛使用,为了方便比较,我们沿用 smoothL1 Loss
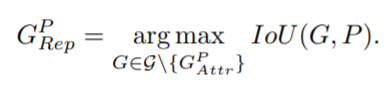
Repulsion Term (RepGT)
RepGT loss 设计是为了远离非目标的真实框 对于一个候选框 P,其排斥对象被定义为,除去本身要回归目标的真实框外,与其 IoU 最大的真实框
受 IoU loss 启发,我们定义了一个 IoG
损失定义如下
这里没有采用 smooth l1 loss 而是 smooth ln loss,其公式如下
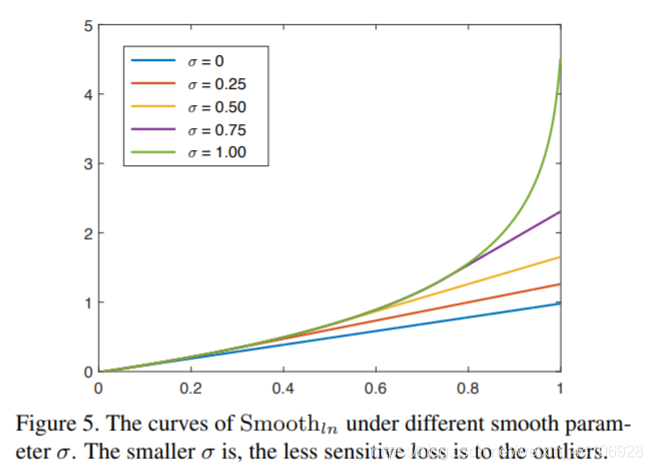
不同平滑系数,最后陡峭程度不一样。当一个候选框 P 与非目标的真实框重叠越多,其惩罚也越大。
Repulsion Term (RepBox)
这项损失是针对人群检测中,NMS 处理对阈值敏感的问题 我们先将 P + 集合划分成互斥的 g 个子集(因为一共有 g 个目标物体)
然后从两个不同子集随机采样,分别得到两个互斥集合的预测框,即
我们希望这两个互斥集合出来的回归框,交叉的范围尽可能小,于是有了 RepBox loss,公式如下

其中分母的 I 是 identity 函数,即
这里限制大于 0,为了避免分式除 0,我们这里加了个ϵ 极小值 上面依旧采用 Smooth ln 函数来计算。
距离函数选择
在惩罚项中,我们分别选择了 IoG 和 IoU 来进行度量。 其原因是 IoG 和 IoU 把范围限定在了 (0, 1),与此同时 SmoothL1 是无界的。 如果 SmoothL1 用在 RepGT 中,它会让预测框与非目标的 gt 框离的越远越好,而我们的初衷只是想减少交叉部分,相比之下,IoG 更符合我们的思想
另外在 RepGT 中使用 IoG 而不使用 IoU 的原因是,IoG 的分母下,真实框大小 area(G) 是固定的,因此其优化目标是去减少与目标框重叠,即 area(B∩G)。而在 IoU 下,回归器也许会尽可能让预测框更大(即分母)来最小化 loss