过程:
- 根据分类概率从小到大排序ABCDEF
- 从最大概率F开始,F与A~E的IOU是否大于阈值
- 大于的扔掉,从剩下的当中继续重复2~3
import numpy as np
def nms(bbox, scores, Nt):
if len(bbox) == 0:
return []
bboxes = np.array(bbox)
x1 = bboxes[:, 0]
y1 = bboxes[:, 1]
x2 = bboxes[:, 2]
y2 = bboxes[:, 3]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
order = np.argsort(scores)
res = []
while order.size > 0:
index = order[-1]
res.append(bboxes[index])
x11 = np.maximum(x1[index], x1[order[:-1]])
y11 = np.maximum(y1[index], y1[order[:-1]])
x22 = np.minimum(x2[index], x2[order[:-1]])
y22 = np.minimum(y2[index], y2[order[:-1]])
w = np.maximum(0, x22-x11+1)
h = np.maximum(0, y22-y11+1)
inter = w * h
ious = inter / (area[index] + area[order[:-1]] - inter)
left = np.where(ious < Nt)
order = order[left]
return resSoft-NMS
NMS算法保留score最高的预测框,并将与当前预测框重叠较多的proposals视作冗余,显然,在实际的检测任务中,这种思路有明显的缺点,比如对于稠密物体检测,当同类的两个目标距离较近时,如果使用原生的nms,就会导致其中一个目标不能被召回,为了提高这种情况下目标检测的召回率,Soft-NMS应运而生。对于Faster-RCNN在MS-COCO数据集上的结果,将NMS改成Soft-NMS,mAP提升了1.1%。
它认为重叠较多的proposals也有可能包含有效目标,只不过重叠区域越大可能性越小。参见下图,NMS会将绿色框的score置0,而Soft-NMS会将绿色框的score由0.8下降到0.4,显然Soft-NMS更加合理。
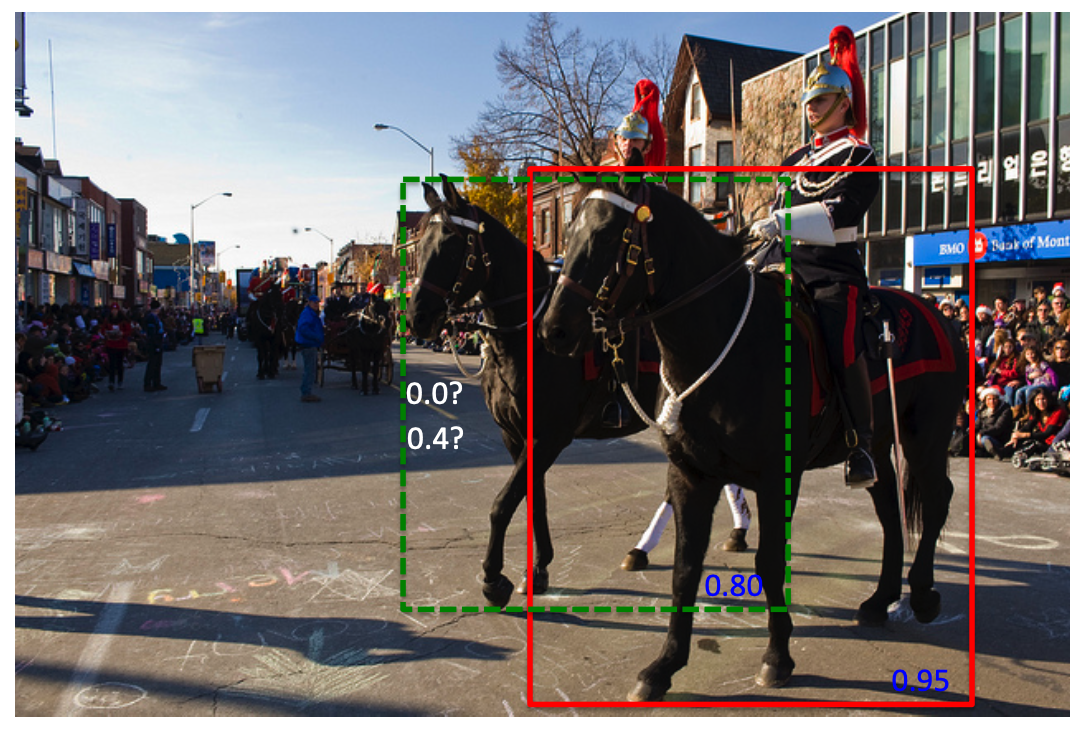
那么问题来了,怎么建立Iou和score之间的联系呢,文章中给出的公式如下,
其中\(D\)表示所有保留的有效框集合,\(b_i\) 表示待过滤的第i个预测框,\(s_i\)为第i个预测框对应的分类score。这里使用了高斯函数作为惩罚项,当\(iou=0\)时,分类score不变,当\(0<iou<1\)时,分类score会做衰减。以上图为例,绿色框\(b_i\)和红色框M的iou大于0,经过Soft-NMS后该绿色框的分类score由0.8衰减到0.4,可以推断出,如果图中有第2个绿色框,且其与红色框的重叠区域更大时,那么这个新的绿色框的分类score可能由0.8衰减到0.01。
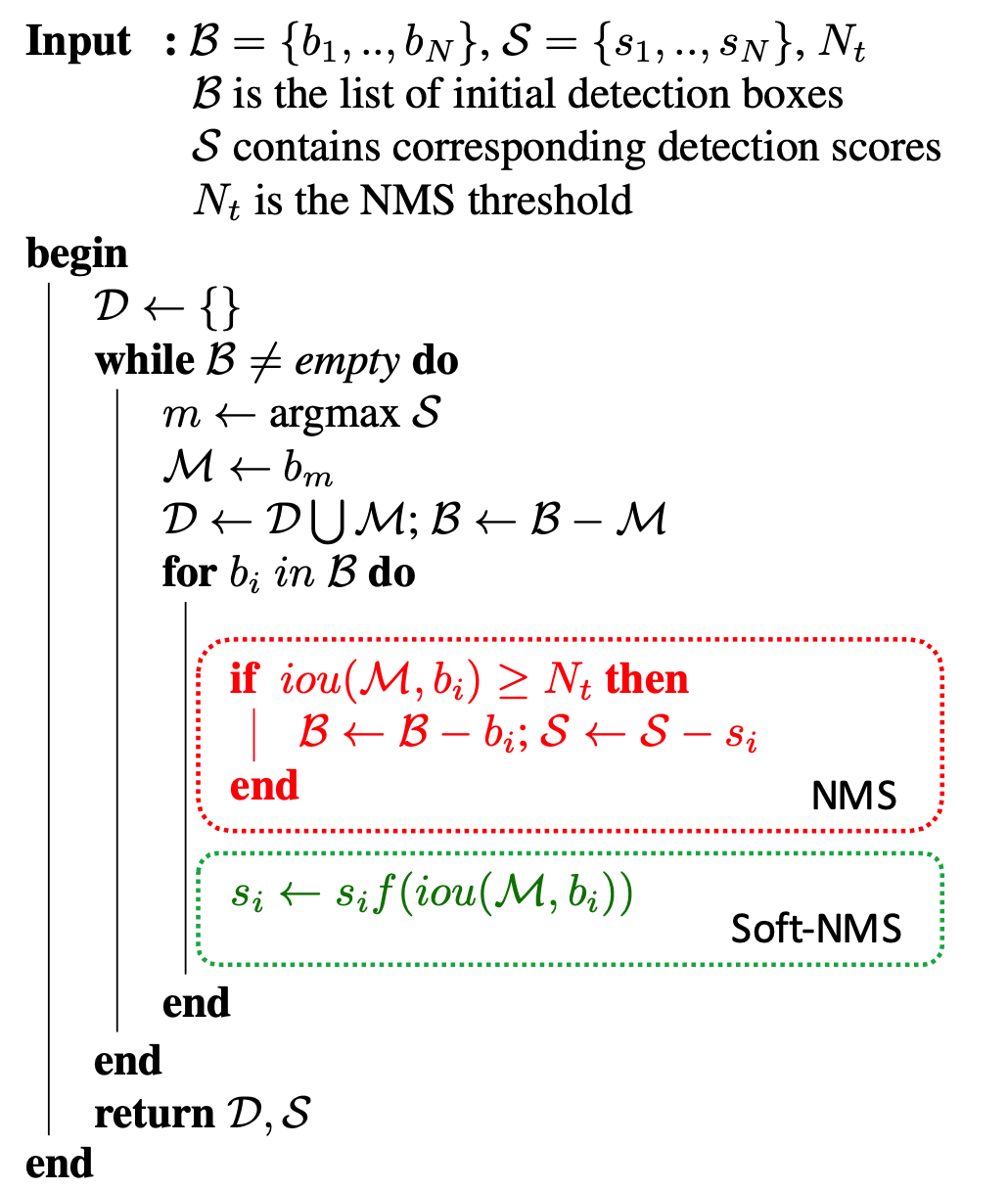
综上,soft-nms的核心就是降低置信度。比如一张人脸上有3个重叠的bounding box, 置信度分别为0.9, 0.7, 0.85 。选择得分最高的建议框,经过第一次处理过后,得分变成了0.9, 065, 0.55(此时将得分最高的保存在D中)。这时候再选择第二个bounding box作为得分最高的,处理后置信度分别为0.65, 0.45(这时候3个框也都还在),最后选择第三个,处理后得分不改变。最终经过soft-nms抑制后的三个框的置信度分别为0.9, 0.65, 0.45。最后设置阈值,将得分si小于阈值的去掉。
Softer-NMS
解决的问题算法
- 检测算法预测出来的proposals的坐标不一定准确;
- 分类score高不一定定位score高,也即classification confidence和 localization confidence不具有一致性。
针对上面的问题,(1)既然proposals的坐标不准确,那么即便NMS也无能为力了,所以需要重新设计坐标回归的方式;(2)既然分类score高不一定定位score高,那么NMS和Soft-NMS的做法(只基于分类score对proposals做排序)是不准确的,所以需要同时预测出检测框的定位score。
算法
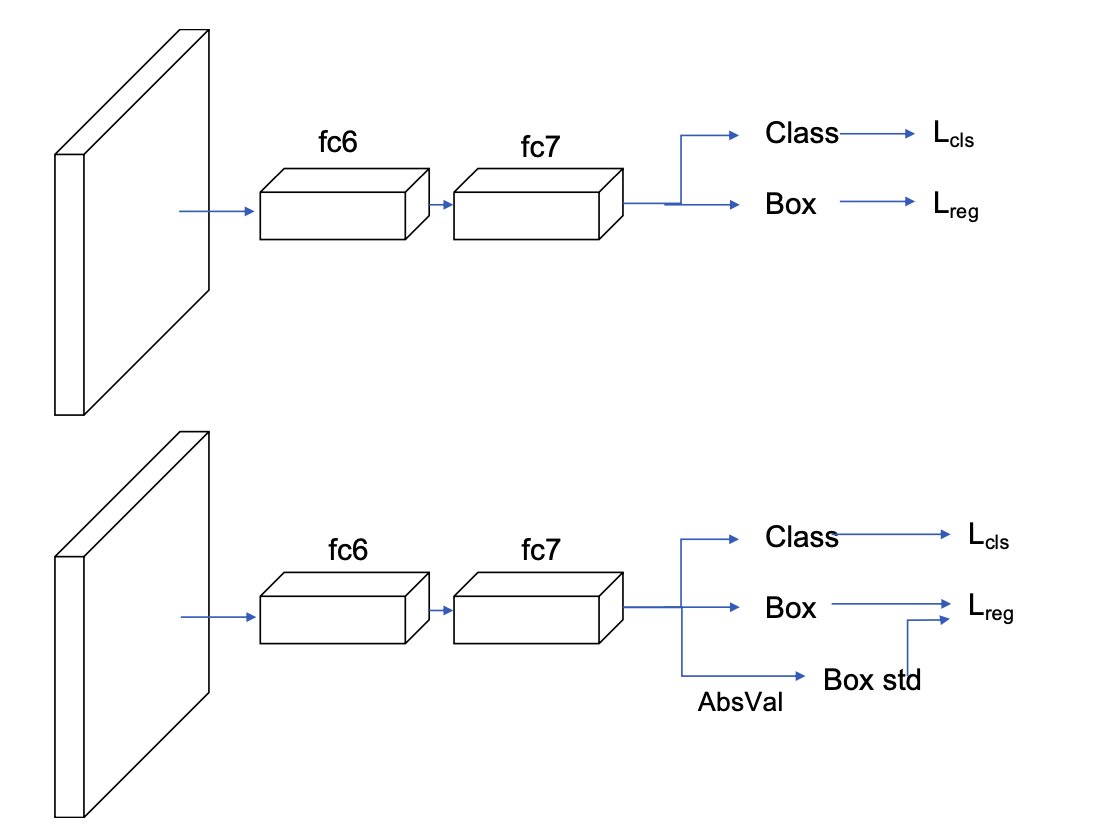
Softer-NMS的算法框架如下图,可以看出,它跟fast R-CNN是非常相似的,区别在于回归任务中多了一个Box std分支,这里需要解释一下,比如预测出的bounding box的坐标为\(x_1,y_1,x_2,y_2\),该分支会预测出每个坐标的标准差,显然,当坐标的标准差越小时,表明预测得到的坐标值越可信,也即Box std分支用于表征定位任务的置信度。
在fast R-CNN中,作者使用的是均方误差函数作为定位损失,总的目的是让定位出的坐标点尽可能逼近groundtruth box。本文中为了在定位坐标同时输出定位score,使用了高斯函数建模坐标点的位置分布,公式如下,
其中,\(x_e\)为预测的box位置,\(\sigma\)表示box位置的标准差,衡量了box位置的不确定性。因为groundtruth位置是确定的,所以groundtruth box的坐标为标准差为0的高斯分布,也即Dirac delta函数,公式如下,
其中,\(x_g\)为groundtruth box的坐标。
回归任务的目的是让预测框尽可能逼近真实框,也即\(P_\theta(x)\)和\(P_D(x)\)为同一分布,衡量概率分布的相似性,自然而然会想到KL散度,关于KL散度的概念,大家可以参见维基百科,值得一提的是,KL散度本身具有不对称性,通常,在实际应用中为了使用对称性,使用的是KL散度的变形形式,但本文中没有这么做。对公式做化简后,最终的简化形式如下,
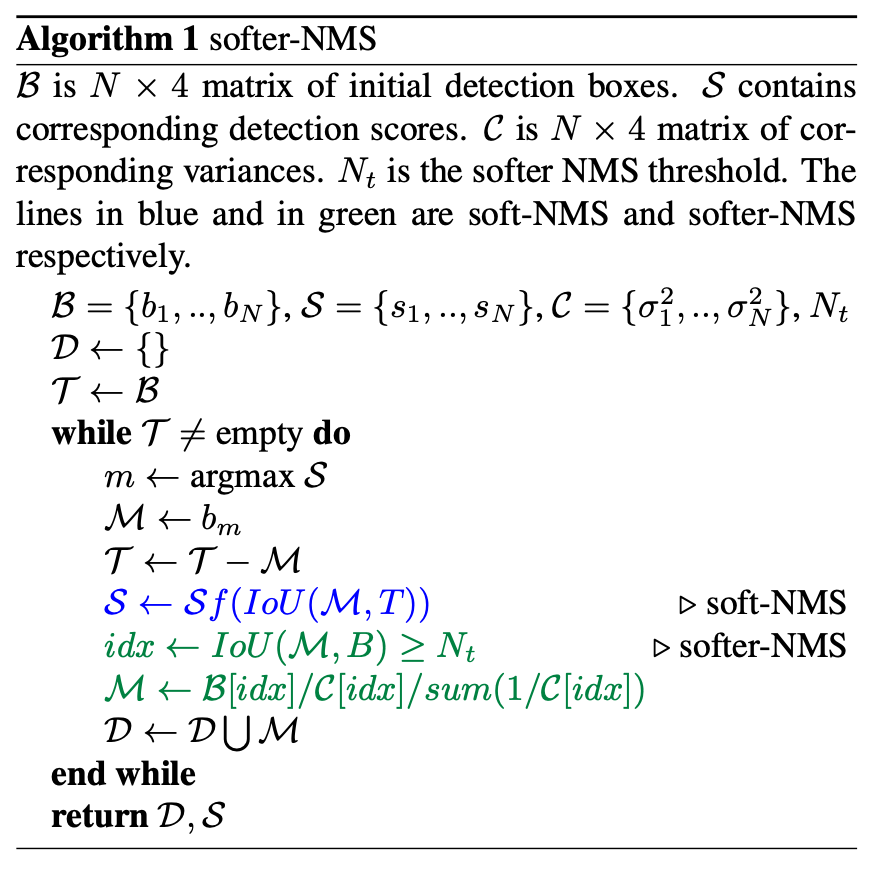
显然,softer-NMS基于回归出的定位confidence,对所有与M的IoU超过阈值\(N_t\)的proposals,使用加权平均更新其位置坐标,从而达到提高定位精度的目的。因为softer-NMS关注的是单个框的定位精度,而NMS和soft-NMS关注的是单个框的冗余性,显然关注点不同,所以softer-NMS可以和soft-NMS组合使用,此时效果更佳。
超过阈值的框根据 IoU 置信度加权合并多个框得到最终框,而不是直接舍弃