SNIPER的关键是减少了SNIP的计算量。SNIP借鉴了multi-scale training的思想进行训练,multi-scale training是用图像金字塔作为模型的输入,这种做法虽然能够提高模型效果,但是计算量的增加也非常明显,因为模型需要处理每个scale图像的每个像素,而SNIPER(Scale Normalization for Image Pyramids with Efficient Resampling)算法以适当的比例处理ground truth(称为chips)周围的上下文区域,在训练期间每个图像生成的chips的数量会根据场景复杂度而自适应地变化,由于SNIPER在采样后的低分辨率的chips上运行,故其可以在训练期间收益于Batch Normalization,而不需要在GPU之间再用同步批量标准化进行统计信息。实验证明,BN有助于最后性能的提升。
这些chips主要分为两大类:
一种是postivice chips,这些chips包含ground truth;
另一种是从RPN网络输出的ROI抽样得到的negative chips,这些chips相当于是难分类的背景,而那些容易分类的背景就没必要进行多尺度训练了。
因此模型最终只处理这些chips,而不是处理整张图像,这样就达到提升效果的同时提升速度。相比于SNIP,基于Faster RCNN(ResNet101作为Backbone)的实验结果显示SNIPER的mAP值比SNIP算法提升了4.6百分点,所以效果也还是非常不错的。在单卡V100上,每秒可以处理5张图像,这个速度在two-stage的算法中来看并不快,但是效果是非常好。
SNIPER的思路:
把图片丢到网络中时,就会产生不同尺度的feature map。作者的想法就是在特征图上的ground truth box周围去crop一些图片,这些图片称为chips。
1、如何选择positive chips : 就是在图像金字塔的每一层中,都设定一个范围,在该大小范围内的目标就可以标出来作为ground truth box,然后对图片中ground truth box所在的地方进行crop,crop出来的图片就是chips。这决定哪些gt目标参与该尺度的训练。在每个尺度贪婪地选择包含gt目标最多的chip作为正chip,每个gt至少在一个chip中(因为范围R有重叠)。
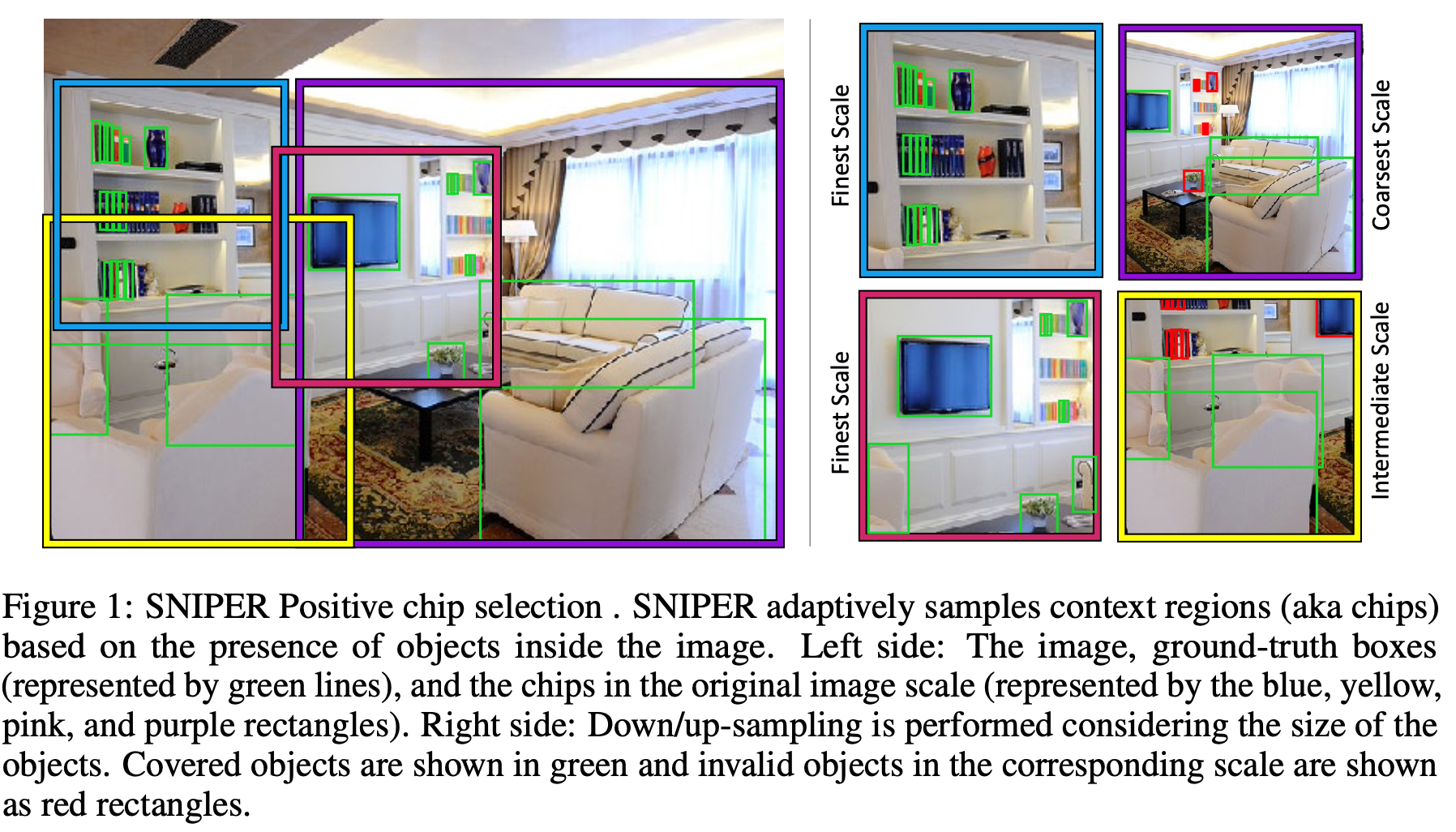
左侧中,绿色框起来的就是ground truth的所在,其他颜色是生成的chips,这张图就生成了4个chips,右侧中绿色线条就是valid box,红色的线就是invalid box。可以看出,合适尺度内的ground truth box就是valid box(蓝色和红色框内绿线),否则就是invalid box(黄色和紫色图中的红线就是invalid)(clip的尺寸要比原图小很多,不然就起不到减少计算量的目的,对于高分辨率的图,clip可以比它小十倍不止)
2、如何选择negative chips : 如果只基于前面的positive chip,那么因为大量的背景区域没有参与训练,所以容易误检(比较高的false positive rate),传统的multi scale训练方式因为有大量的背景区域参与计算,所以误检率没那么高,但因为大部分背景区域都是非常容易分类的,所以这部分计算量是可以避免的,于是就有了negative chip seleciton。选择negative chips的目的在于要让网络更容易去判断出哪些是背景,而不必花费太多的时间在上面。在Faster-RCNN中的RPN的其中一步就是,将anchor和ground truth box交并比小于0.3视为背景,全部去掉(去掉易分样本)。然后剩下的再去掉完全覆盖groun truth box的proposal(去掉易分样本),大部分proposal都是具有假阳性的,也就是和ground truth 都有一部分的交集,但是比较小,我们的negative chips都从这里来。(negative chips就是难分样本)。这样可以用来减少假阳率。

上面一行就是ground truth boxes,下面一行就是作者选择的negative chips,比如最后两个,negative chips都和ground truth box有一定的交集。这就是我们所需要的negative chips。第二行图像中的红色小圆点表示没有被positive chips(Cipos)包含的negative proposals,因为proposals较多,用框画出来的话比较繁杂,所以用红色小圆点表示。橘色框表示基于这些negative proposals生成的negative chips,也就是Cineg。每个negative chip是这么得到的:对于尺度i而言,首先移除包含在Cipos的region proposal,然后在Ri范围内,每个chip都至少选择M个proposal。在训练模型时,每一张图像的每个epoch都处理固定数量的negative chip,这些固定数量的negative chip就是从所有scale的negative chip中抽样得到的。
3、标注label:每一张chip上大概产生300个proposal,但是对这300个proposals不做限制(比如faster-rcnn会滤除掉背景部分,我们不这样),而是对里面的一些proposal抽出来做positive proposal。
4、模型训练:应该是先生成chips,然后再用chips去训练一个端到端的网络,所以其实是分开进行的。
优点
1、确实可以减少计算量;(一张图片可以Crop出5个512x512的chips,而且进行3个尺度的训练,但是它的计算量只比一张800x1333的图片进行单尺度训练多出30%,要是800x1333也进行多尺度训练时,训练量可比这种方法大多了)
2、用固定大小的chips去进行训练时,数据很容易被打包,更利于GPU的使用。(把数据丢到GPU中去训练,这30%的差距算个毛线,GPU计算速度那么大呢)
3、更为重要的是,可以进行多尺度训练,设置更大的batch_size和batch normalization,而且再也不用担心这些操作会拉低我们的速度了!
实验细节:用图像金字塔生成chips的时候,在不同scale的层上使用的ground truth box范围在[0,80²]、[32²,150²]、[120², inf]。训练RPN是为了获取negative chips。每一张图上产生的chips是不同的,如果这张图包含的目标多,产生的chips就会增多,相反则减少。
在SNIP的基础上加了一个「positive/negative chip selection」,从实验结果来看是非常SOTA的,可以说碾压了Mosaic反应出来的结果。另外基于ResNet101的Faster RCNN架构结合SNIPER,精度超过了YOLOV4接近4个点,效果是非常好的。